Matlab Online เครื่องมือวิเคราะห์ทางวิศวกรรมบน Web browser
MATLAB Online นำพลังของ MATLAB มาสู่เบราว์เซอร์ของคุณ ทำให้การวิเคราะห์และการทำงานร่วมกันเป็นไปอย่างราบรื่น
MATLAB Online นำพลังของ MATLAB มาสู่เบราว์เซอร์ของคุณ ทำให้การวิเคราะห์และการทำงานร่วมกันเป็นไปอย่างราบรื่น
MATLAB เป็นภาษาคอมพิวเตอร์ประสิทธิภาพสูงสำหรับการประมวลผลทางด้านวิทยาศาสตร์ วิศวกรรมศาสตร์ โดยผสานรวมการคำนวณ การแสดงภาพ และการเขียนโปรแกรมในสภาพแวดล้อมที่ใช้งานง่าย เป็น graphic user interface
24 VDC Motor มีการนำมาใช้งานอย่างแพร่หลาย เนื่องมาจากแหล่งจ่ายไฟฟ้า 24VDC เป็นแหล่งจ่ายที่หาได้ง่าย พบได้ทั่วไป เช่น แบตเตอร์รีของรถยนต์ เครื่องใช้ไฟฟ้า อุปกรณ์เครืองมือช่าง ดังนั้นการศึกษาแบบจำลองดีซีมอเตอร์ เป็นประโยชน์ต่อการศึกษาพลศาสตร์ของระบบทางวิศวกรรมเป็นจำนวนมาก
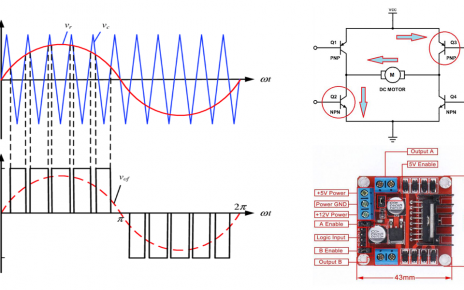
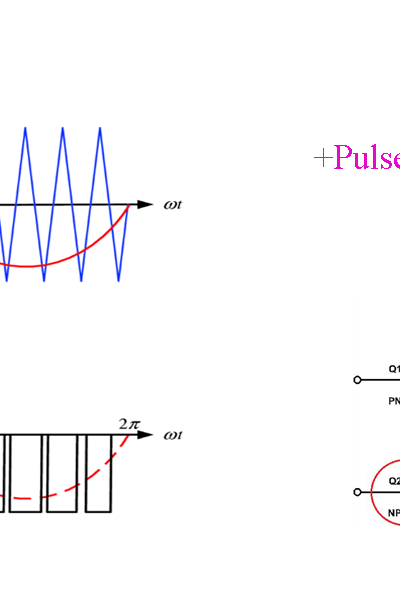
พัลส์วิดมอดูเลชั่น(Pulse width modulation) เป็นเทคนิคการมอตดูเลตความกว้างของสัญญาณพัลส์ที่มีประสิทธิภาพและนำมาใช้งานอยู่บ่อยในในอุปกรณ์อิเล็กทรอนิกส์กำลัง เพื่อการควบคุมความเร็วรอบของมอเตอร์ การมอดูเลตความกว้างพัลส์จะลดกำลังของภาคอิเล็กทรอนิกส์กำลังที่จะต้องใช้ในการขับมอเตอร์ลงไปได้ ขนาดของความกว้างพัลส์จะแปรผันตามขนาดของสัญญาณควบคุม
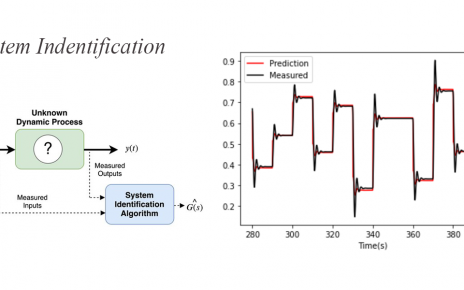
ในกรณีที่เราไม่ทราบสมการพลศาสตร์ของระบบ แต่เราสามารถทดสอบระบบโดยการป้อนอินพุตแบบ Unit Step และทำการบันทึกผลตอบสนอง พบว่าระบบให้ผลตอบสนองออกมาในแนวโน้มเดียวกับระบบพลศาสตร์ที่มีอนุพันธ์อันดับสอง เราก็สามารถใช้ Transfer function ของระบบพลศาสตร์ที่มีอนพันธ์อันดับสอง
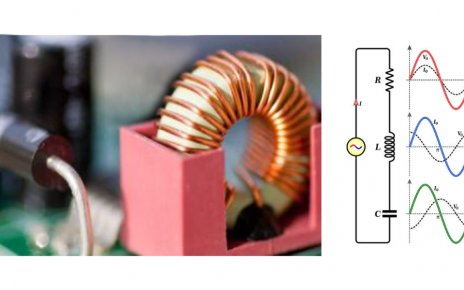
วงจร RLC อนุกรม สามารถเขียน circuit diagram ได้ดังนี้ เราจะสร้างแบบจำลองทางพลศาสตร์ของวงจรโดยกำหนดให้ V ค่าแรงดันไฟฟ้าอินพุต R ค่าความต้านทาน C ค่าสัมประสิทธิประจุกระแสไฟฟ้า L ค่าความเหนี่ยวนำ
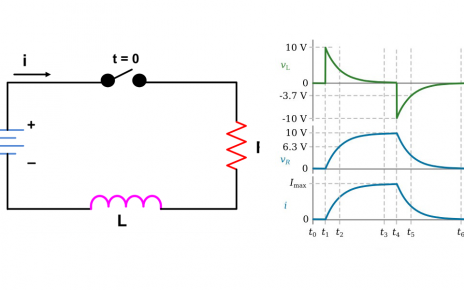
วงจร RL เป็นระบบพลศาสตร์ทางไฟฟ้าที่มีอนุพันธ์อันดับหนึ่ง ในการศึกษาการควบคุมระบบพลศาสตร์ของ วงจร RL เราสามารถเขียน circuit diagram แต่ทั้งนี้เราจะใช้โปรแกรม Simulink ในการหาผลตอบสนองของระบบ จัดรูปสมการ (1)
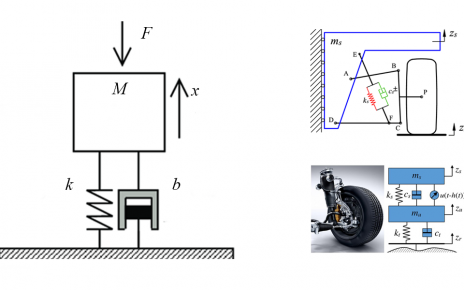
การศึกษาระบบพลศาสตร์ของ Mass spring damped system เริ่มจากการพิจารณา free body diagram ของระบบ ประกอบไปด้วย มวล ปริง และ แดมเปอร์ ผลตอบสนองของระบบ ซึ่งแบ่งได้เป็น 4 กรณี

Matlab ได้เตรียมเครื่องมือเอาไว้อย่างมากมายสำหรับงานด้าน Control Systems เราจะเริ่มด้วย จะเริ่มจาการสร้าง Transfer Function ย่อย ทั้ง 4 บล๊อก แล้วยุบรวมบจะได้ Close Loop Transfer Function
Root locus คือการศึกษาตำแหน่งของโพลทุกตำแหน่งบน Complex plane ที่ได้จากค่ารากของสมการคุณลักษณะเฉพาะเมื่อค่า K เปลี่ยนแปลงไป ซึ่งหากต้องการร่าง Root Locus ด้วยมือจะมีขั้นตอนและรายละเอียดเยอะพอสมควร
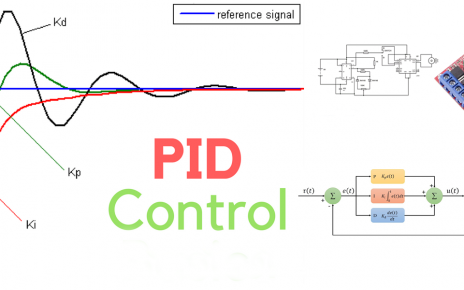
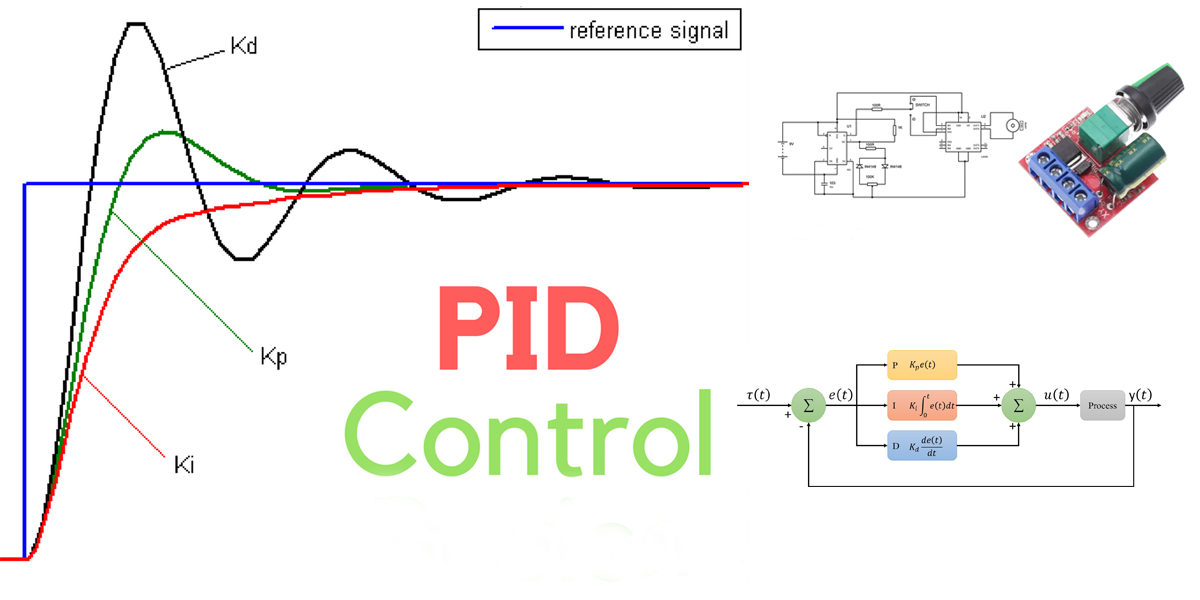
ตัวควบคุมแบบพีไอดี (PID Controller) คือตัวควบคุมกระบวนการที่เราสามารถออกแบบและใช้เพื่อควบคุมการทำงานระบบพลศาสตร์ให้มีผลตอบสนองตามที่เราต้องการ พีไอดี คอนโทรลเลอร์ ประกอบด้วยตัวควบคุมย่อย 3 ตัว
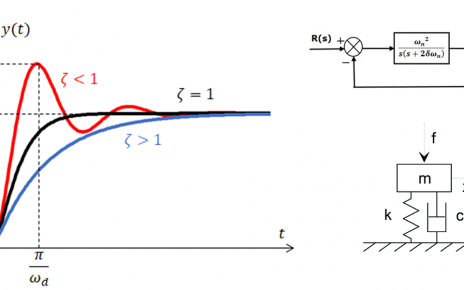
ระบบพลศาสตร์จำนวนมากสามารถประมาณการผลตอบสนองของระบบโดยใช้สมการเชิงอนุพันธ์อันดับสอง และสามารถเขียนเป็น Laplace Transform Block diagram สามารถจัดแบ่งการตอบสนองของระบบออกได้เป็น 4 กรณี
ในบล๊อกนี้จะศึกษาแบบจำลองของระบบแบบจำลองการควบคุมถังกวนแบบปฏิกิริยาต่อเนื่อง 2 ถัง ต่อกันแบบอนุกรม โดยมีสมมติฐานดังนี้ จะได้สมการอนุพันธ์ของระบบในช่วง Stead state ดังนี้
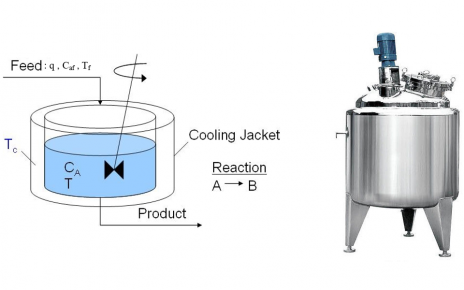
ถังกวนแบบปฏิกิริยาต่อเนื่อง Continuous Stirred Tank Reactor (CSTR) พบมากในอุตสาหกรรม ในบล็อกนี้เราจะศึกษาแบบจำลองโดยอ้างอิงจาก หนังสือ Process Dynamics: Modeling, Analysis and Simulation สำนักพิมพ์ Prentice-Hall
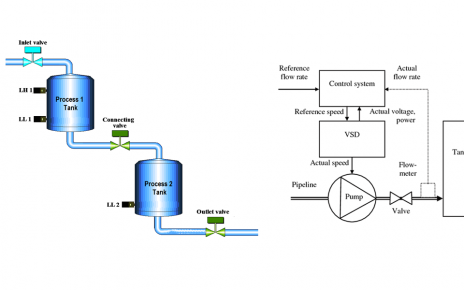
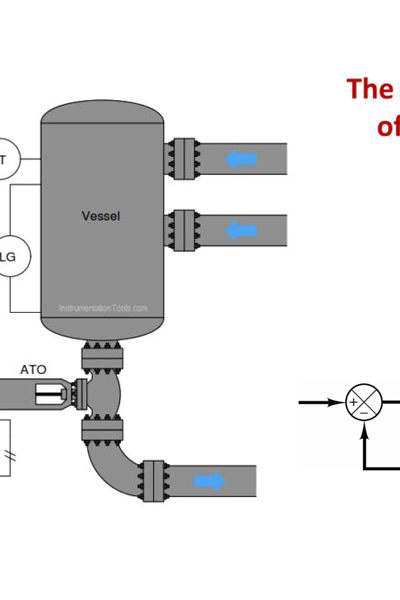
การศึกษาระบบควบคุมระดับน้ำในถังที่เชื่อมต่อกัน เริ่มต้นที่การศึกษาแบบจำลองของระบบรักษาระดับน้ำถังเดียว แสดงดังรูปที่ 1
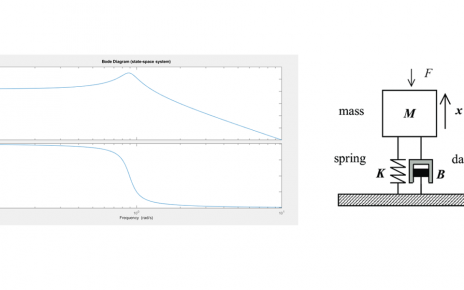
จากที่ได้ศึกษาจากบล๊อก จำลองการทำงานของ Mass spring damped system บล๊อกนี้ขอนำเสนอการ plot ที่จำเป็นเพิ่มเติมต่อการวิคราะห์ระบบ 1) รันสคริปข้อมูลพื้นฐานระบบ mass spring damped system
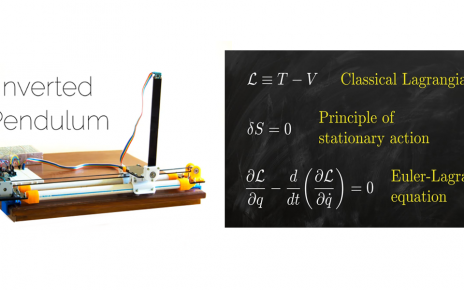
นอกจากการใช้กฎข้อที่สองของนิวตันในการหาสมการพลศาสตร์แล้ว ยังมีอีกหนึ่งวิธีที่ใช้กันบ่อย ก็คือการใช้ Lagrange’s equation เขียนในรูปทั่วไปได้ดังนี้
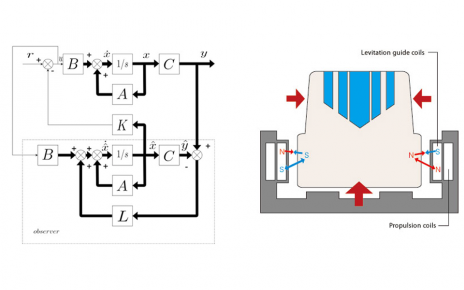
State observer ก็คือการสร้างแบบจำลองคู่ขนานกับระบบพลศาสตร์จริง เพื่อประมาณค่าตัวแปรเสตทของระบบจริงนั้นเอง ตัวสังเกตุ(Observer) มีวิธีการออกแบบหลายวิธี บล๊อกนี้จะขอใช้วิธีตามหนังสือ Modern Control Engineering
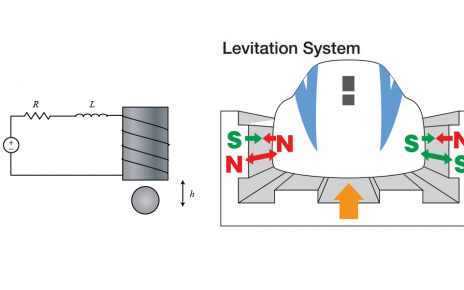
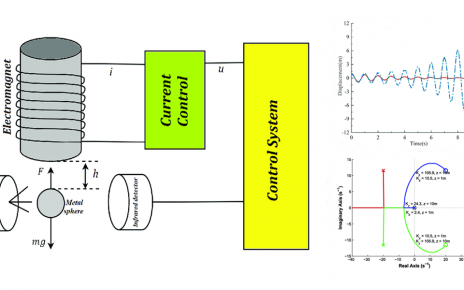
จากสคริป พบว่าระบบมีโพล ดังนี้ poles = 15.6118 ,-15.6932 , -250.0000 จะพบว่ามีโพล 1 ตัวอยู่ด้านขวาของ Complex plan ซึ่งทำให้ระบบไม่มีเสถียรภาพ สอดคล้องกับกราฟผลตอบสนองระยะของ x เพิ่มมากขึ้นเรื่อยๆ หมายถึงอำนาจแม่เหล็กไม่สามารถยึดเหนี่ยวมวลไว้ในตำแหน่งทำงาน หลุดร่วงออกห่างจากจัดทำงานมากขึ้นเรื่อยๆ
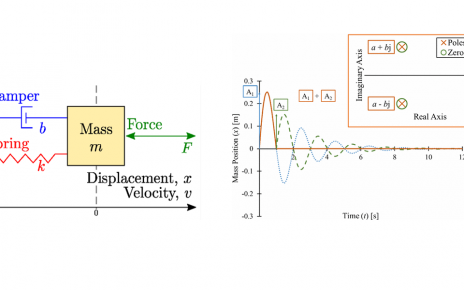
Mass spring damped system นอกจากจะเขียนสมการพลศาสตร์ในรูป SISO แล้ว ยังสามารถเขียนอยู่ในรูปของ State Equation ได้ด้วย โดยสามารถเขียน Free body diagram ได้ดังนี้

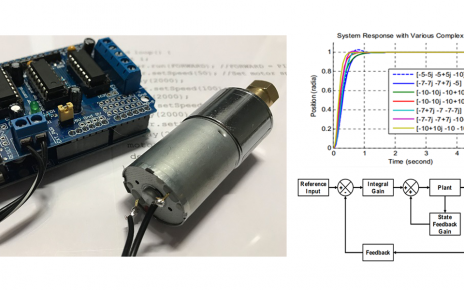
เพื่อให้ดีซีมอเตอร์มีผลตอบสนองในแบบที่เราต้องการ ซึ่งเราทราบว่าผลตอบสนองของระบบ เช่น ค่า Over shoot , Settling Time มีความสัมพันธ์โดยตรงกับตำแหน่งโพลของระบบ ดังนั้นหากเราสามารถกำหนดตำแหน่งโพลให้แก่ดีซีมอเตอร์ได้
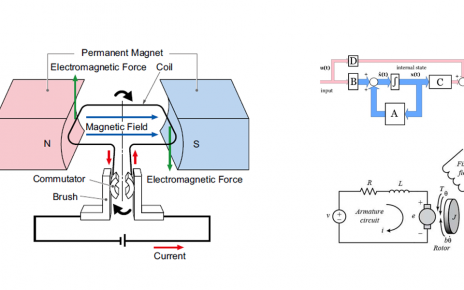
จากที่เราเคยได้ศึกษาการหาแบบจำลองแบบ Single Input/Sigle Output (SISO) ของ DC มาแล้วในบล๊อก จำลองการทำงาน DC Motor ด้วย Matlab/Simulink ครั้งนี้เราจะมีจัดรูปสมการของ DC Motor ให้เป็นแบบ State Model

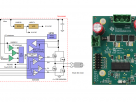
Half-controlled converters หรือมีชื่อเรียกอีกแบบว่า “เซมิคอนเวอร์เตอร์” เป็นวงจรควบคุมกำลังไฟฟ้าแบบใช้อุปกรณ์สารกึ่งตัวนำควบคุมได้ เช่น Thyristor , SCR , IGBT หรือ Mosfet เพียง 2 ตัว สามารถจัดวางอุปกรณ์ในวงจรได้แตกต่างกัน 2 แบบ ดังแสดงในรูปที่ 1
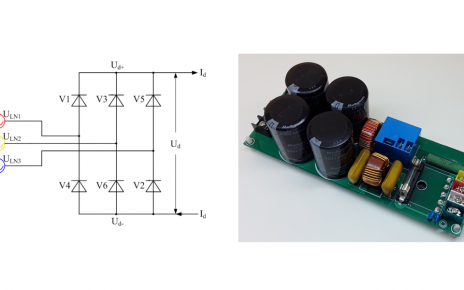
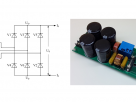
วงจรเรียงกระแสไฟฟ้าสลับ 3 เฟสแบบเต็มคลื่น (Full wave 3 phases Rectifier) โดยใช้ไดโอด เป็นอีกหนึ่งวงจรไฟฟ้าที่พบมากที่สุดในเครื่องจักรอุตสาหกรรม ที่ต้องการกำลังไฟฟ้าสูง แสดงได้ดังรูปที่ 1
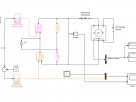
โดยทั่วไปแล้วอินเวอร์เตอร์บริดจ์เฟสเดียว ถูกนำมาใช้อย่างกว้างขวาง เช่นสำหรับการแปลงพลังงานแสงอาทิตย์เป็นไฟฟ้ากระแสสลับ และใช้เป็นวงจรควบคุมความเร็วรอบของมอเตอร์ไฟฟ้ากระแสตรง
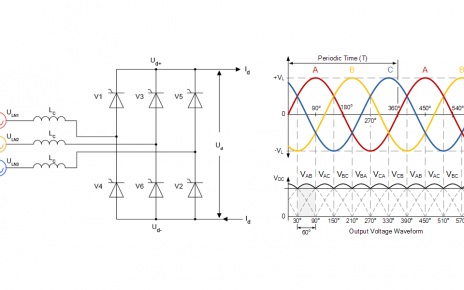
วงจรเรียงกระแสสามเฟสหกพัลส์แบบควบคุมได้เป็นวงจรที่แปลงแรงดันไฟฟ้ากระแสสลับเป็นแรงดันไฟฟ้ากระแสตรง ประกอบด้วยไทริสเตอร์หกตัวที่จัดเรียงในรูปแบบบริดจ์ พบมากในเครื่องจักรที่ต้องการ ควบคุม Output Waveform
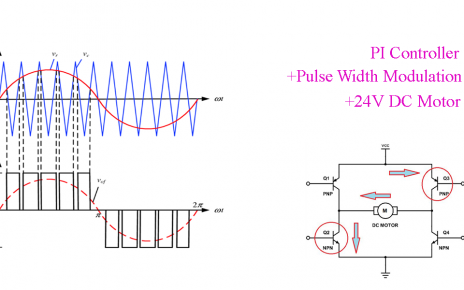
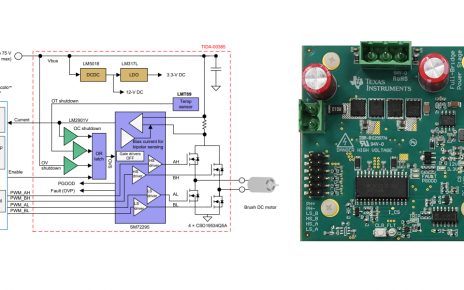
ในการใช้งาน DC Motor เรามักจะใช้ PI Controller + Pulse Width Modulation + Power Amp + DC Motor โดยให้ PWM เป็นตัวจ่ายสัญญาณให้แก่วงจรเพาเวอร์แอมป์ เพื่อขับดีซีมอเตอร์ ในบล็อกนี้เราจะศึกษา องค์ประกอบการควบุคม DC Motor ที่นิยมนำไปประยุกต์ใช้งานในทางปฏิบัติ
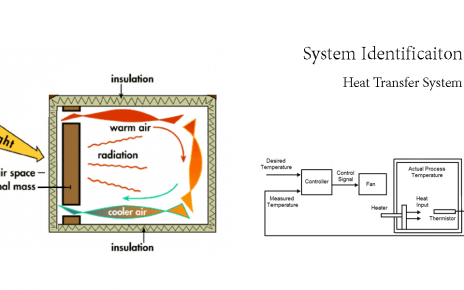
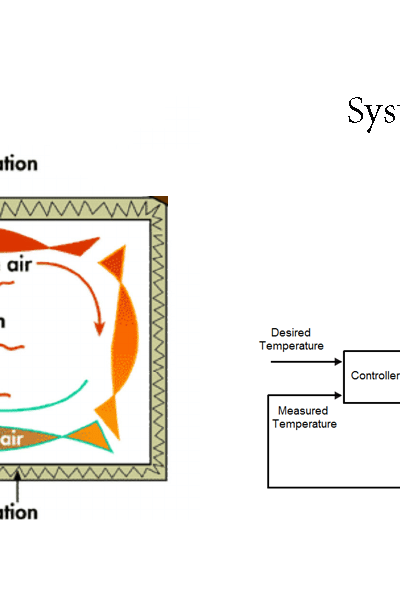
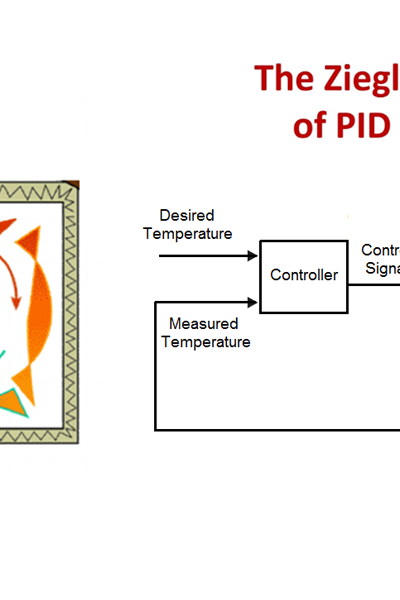
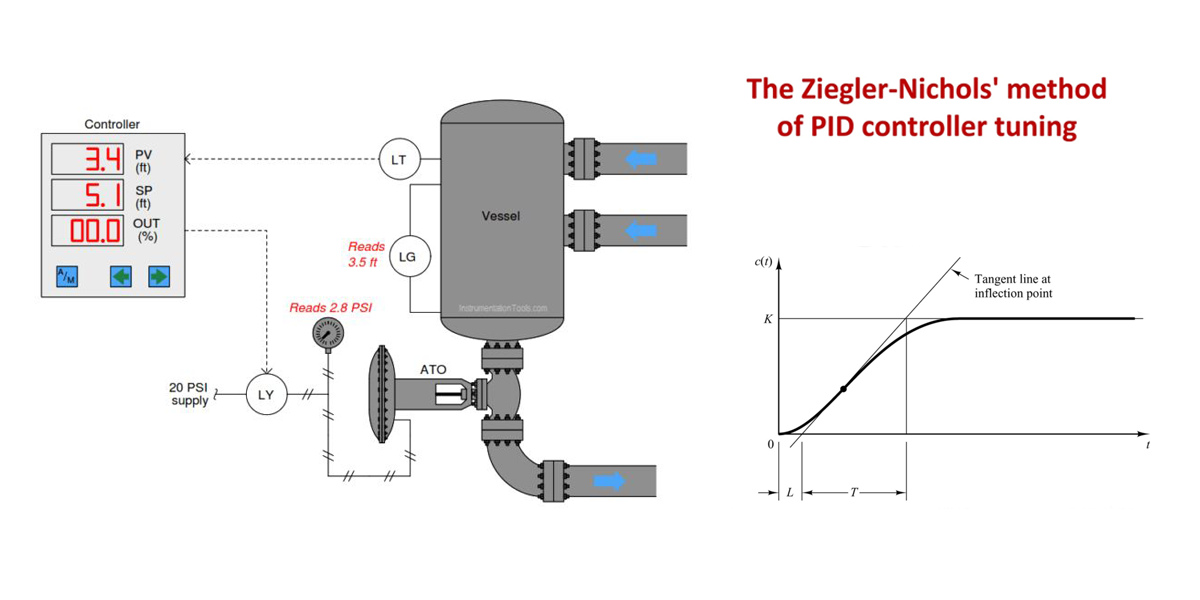
Ziegler Nicoles ออกแบบพีไอดี เพื่อควบคุมการถ่ายโอนความร้อน(Heat Transfer) เมื่อไม่มีข้อมูลใดๆ มาก่อนเลย จากรูปที่ 1 พบว่า Heater จะทำหน้าที่ผลิตความร้อน ภายในพื้นที่ควบคุมที่มีการหุ้มฉนวนโดยเราจะถือว่ามีการสูญเสียความร้อนน้อยมาก (adiabatic system) และมีเซนเซอร์ตรวจจับอุณหภูมิ
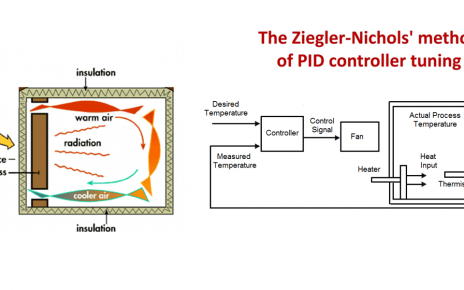
ระบบถ่ายโอนความร้อน (Heat Transfer) พบบ่อยในกระบวนการทางอุตสาหกรรม หากเราไม่ทราบสมการพลศาสตร์ของระบบ หรือแม้แต่ไม่ทราบการออกแบบเลย แต่มีความจำเป็นต้องหาติดตั้งตัวควบคุม PID เพื่อให้การถ่ายโอนความร้อนเป็นไปตามที่เราประสงค์ ก็สามารถทำได้โดยไม่ยากเกินไป
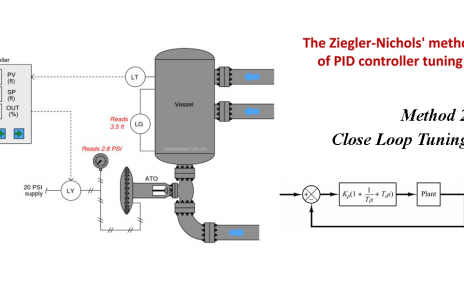
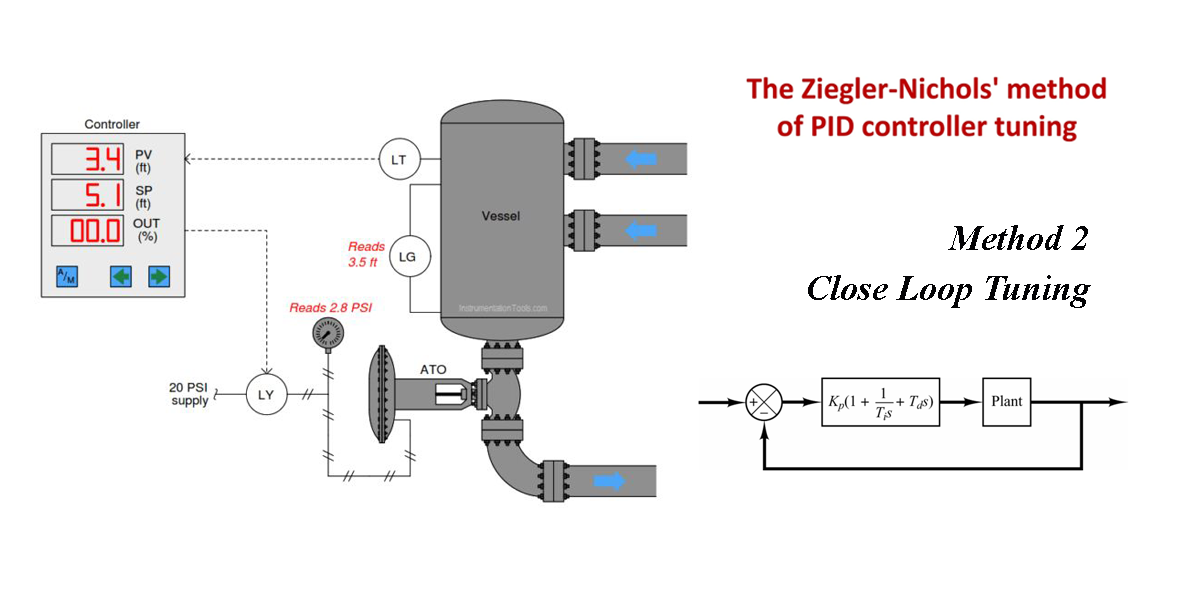
ในบล๊อกนี้เราจะศึกษา Ziegler-Nicoles Method 2 ซึ่งจะสามารถหาค่าพารามิเตอร์ PID โดยไม่จำเป็นต้องทราบสมการพลศาสตร์ของระบบ ในขณะที่ระบบยังมีการทำงานแบบวงปิด(Close Loop) โดยปกติแล้วระบบป้อนกลับ (Feedback control) ที่มีตัวควบคุม PID จะแสดงได้ดังรูปที่ 1
ระบบปีกยกตัวของเครื่องบินจะถูกติดตั้งอยู่ปลายปีกด้านหลัง เพื่อช่วยในการรักษาระดับการบิน (Aircraft’s horizontal stabilizer) แสดงได้ดังรูปที่ 1 การหมุนปลีกยกตัวจะใช้ต้นกำลังเป็นกระบอกสูบไฮดรอลิก ผ่าน mechanical link เพื่อสร้างมุม
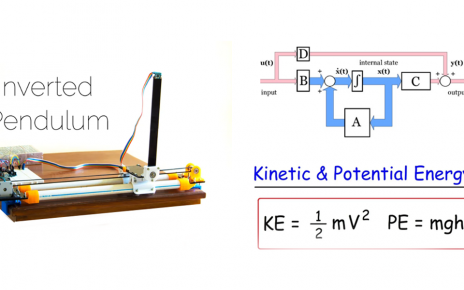
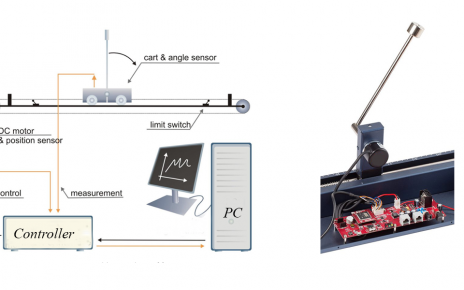
โดยในบล๊อกนี้เราจะลองการทำงานของ Inverted Pendulum ด้วยวิธีการ Transfer function และจำลองการทำงานตัวสังเกตุ ด้วยวิธีการสมการเสตท(State space equation) และเพิ่ม Integral Action เพื่อตัวควบคุมระบบ
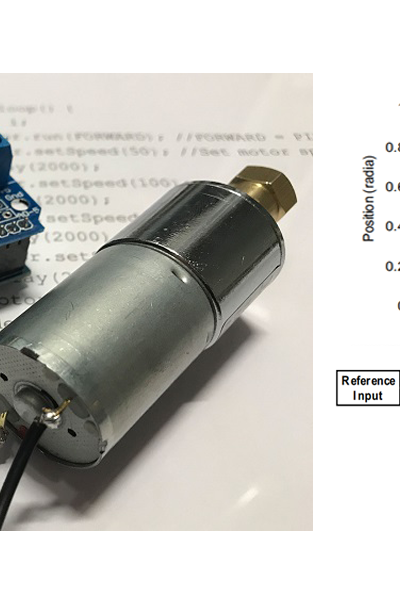
การควบคุมตำแหน่งการหมุนของ DC Motor เป็นแอพพลิเคชั่นที่เรียกว่า เซอร์โวมอเตอร์ที่เราเห็นกันในอุตสาหกรรม เพราะโดยปกติแล้ววัตถุประสงค์หลักของการเลือกใช้เซอร์โว ก็เพื่อต้องการนำมาใช้ในการควบคุมตำแหน่งการหมุนเป็นหลัก
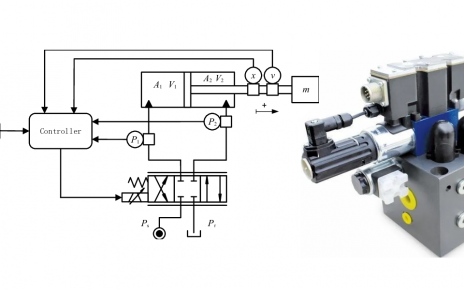
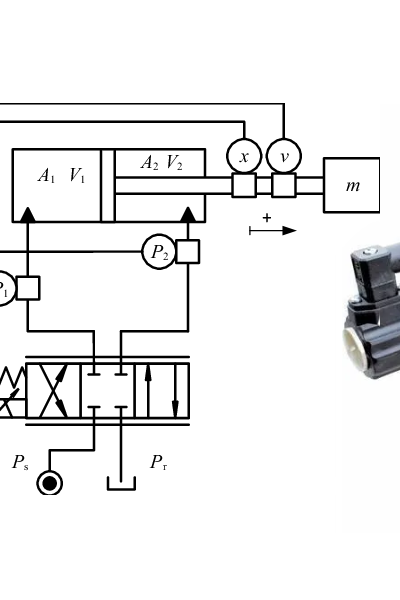
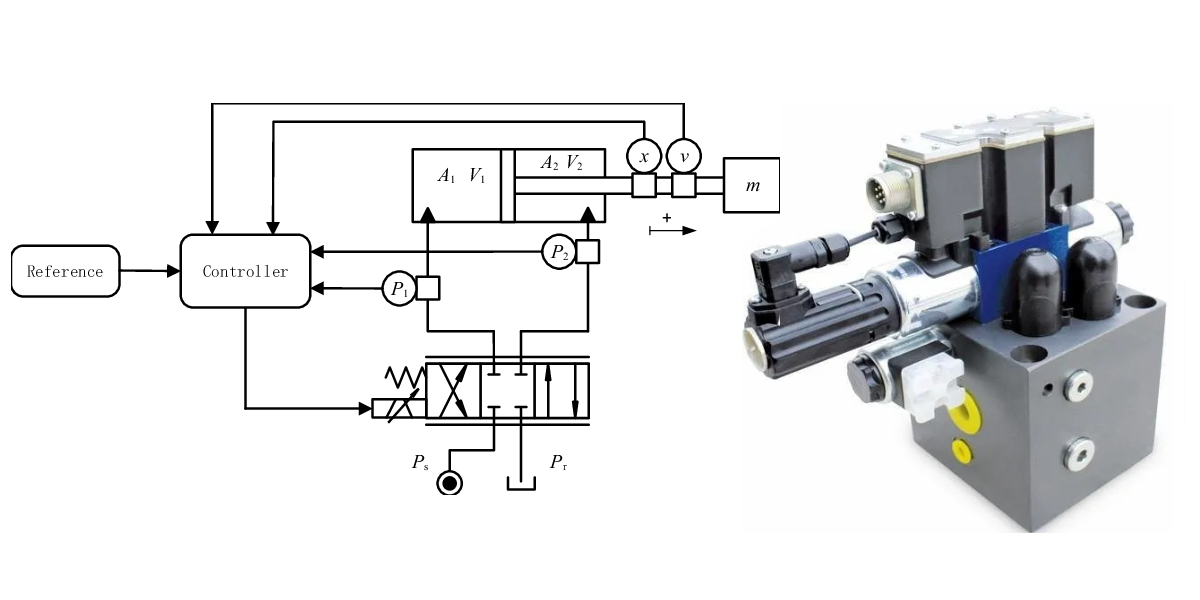
เซอร์โวไฮดรอลิก เป็นอุปกรณ์ที่มีใช้อย่างแพร่หลายในอุตสาหกรรมหนัก เพราะด้วยคุณสมบัติของระบบไฮดรอลิกที่ให้กำลังสูง สามารถยกสิ่งของน้ำหนักตั้งแต่ไม่กี่กิโลกรัม ถึงหลายสิบตัน เซอร์โวไฮดรอลิก ค่อนข้างมีราคาแพงโดยมาแล้วผู้ผลิตจะสร้างสำเร็จรูป
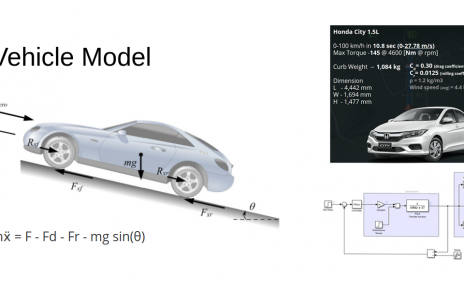
Simple free body diagram ของรถยนต์แสดงได้ดังภาพ จากกฎข้อที่สองของนิวตัน เขียนสมการพลศาสตร์ได้เป็น จากคู่มือ Honda City 1.5L เราจะพบค่าพาริเตอร์ที่จำเป็นต่อการออกแบบระบบดังภาพ
Linear Quadratic Regulator ซึ่งเป็นคอนโทรลเลอร์ที่มีใช้งานกันอย่างแพร่หลายในระบบการควบคุมที่มีความซับซ้อนแบบ Multiple Inputs/Multiple Outputs (MIMO) จากบล๊อกก่อนหน้านี้ เราได้ศึกษาการหา State Model ของลูกตุ้มกลับหัวกันไปแล้ว (Inverted Pendulum)