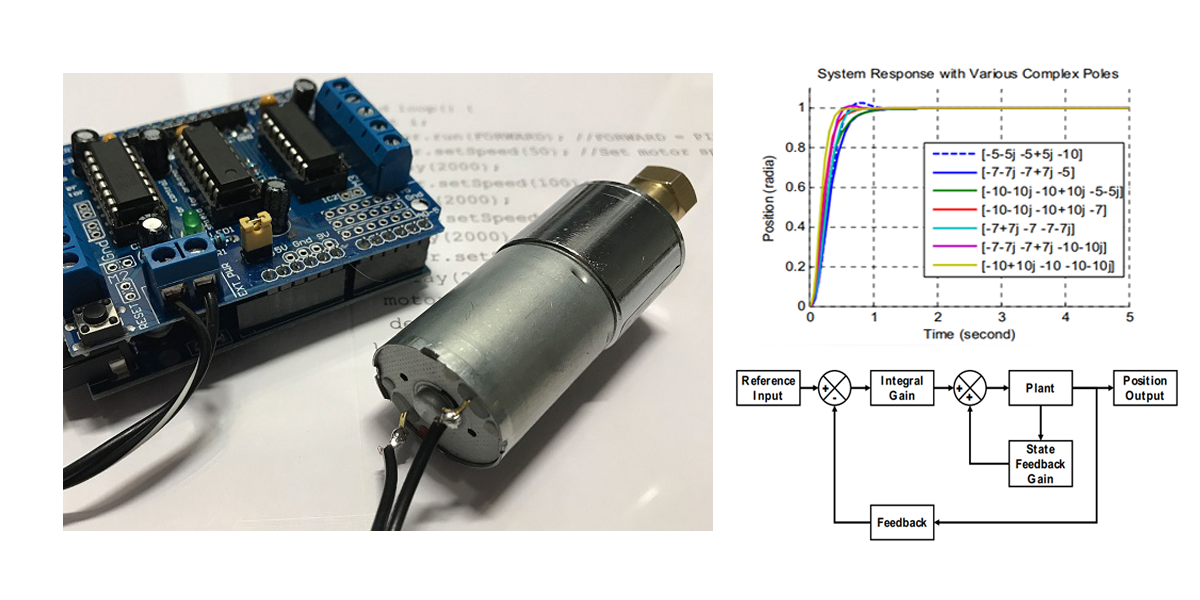
พีไอ คอนโทรลเลอร์(PI Controller)+พัลส์วิดมอดูเลชั่น(PWM)+ ดีซีมอเตอร์(24V DC Motor) การควบคุมแบบปิด(Close Looop Control) โดย Matlab/Simulink
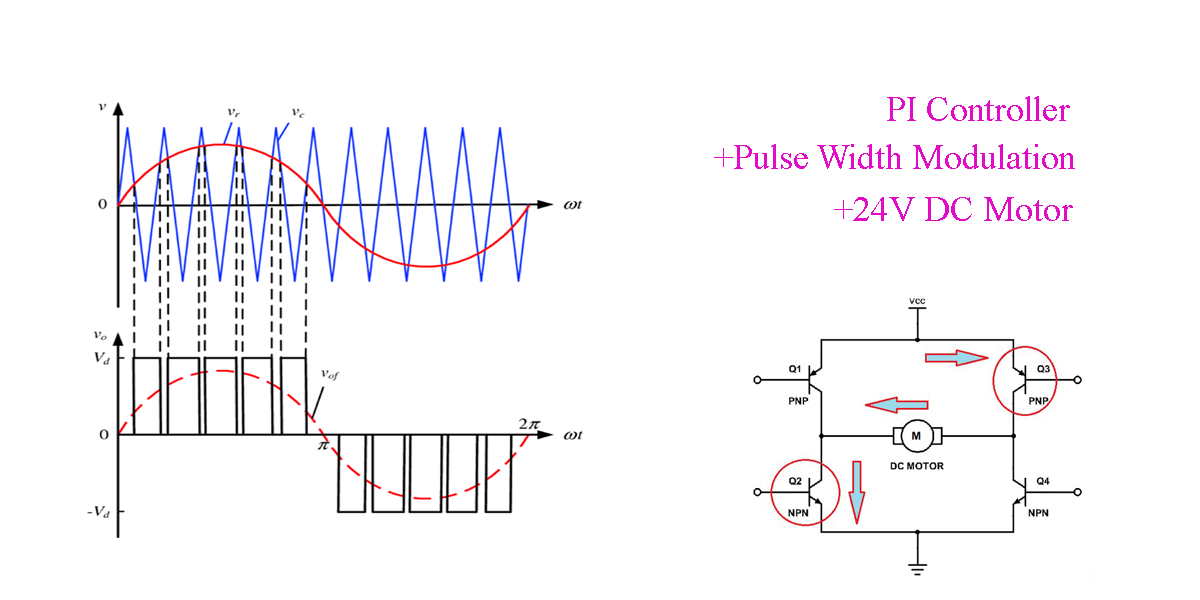
ในการใช้งาน DC Motor เรามักจะใช้ PI Controller + Pulse Width Modulation + Power Amp + DC Motor โดยให้ PWM เป็นตัวจ่ายสัญญาณให้แก่วงจรเพาเวอร์แอมป์ เพื่อขับดีซีมอเตอร์ ในบล็อกนี้เราจะศึกษา องค์ประกอบการควบุคม DC Motor ที่นิยมนำไปประยุกต์ใช้งานในทางปฏิบัติ
Continue Reading