DC-DC converter ถูกนำมาประยุกต์ใช้งานในการจ่ายกำลังไฟฟ้าให้แก่รถยนต์ไฟฟ้า และอุปกรณ์ที่ต้องการแรงดันไฟฟ้าที่สามารถแปรผันได้ผ่านการควบคุม
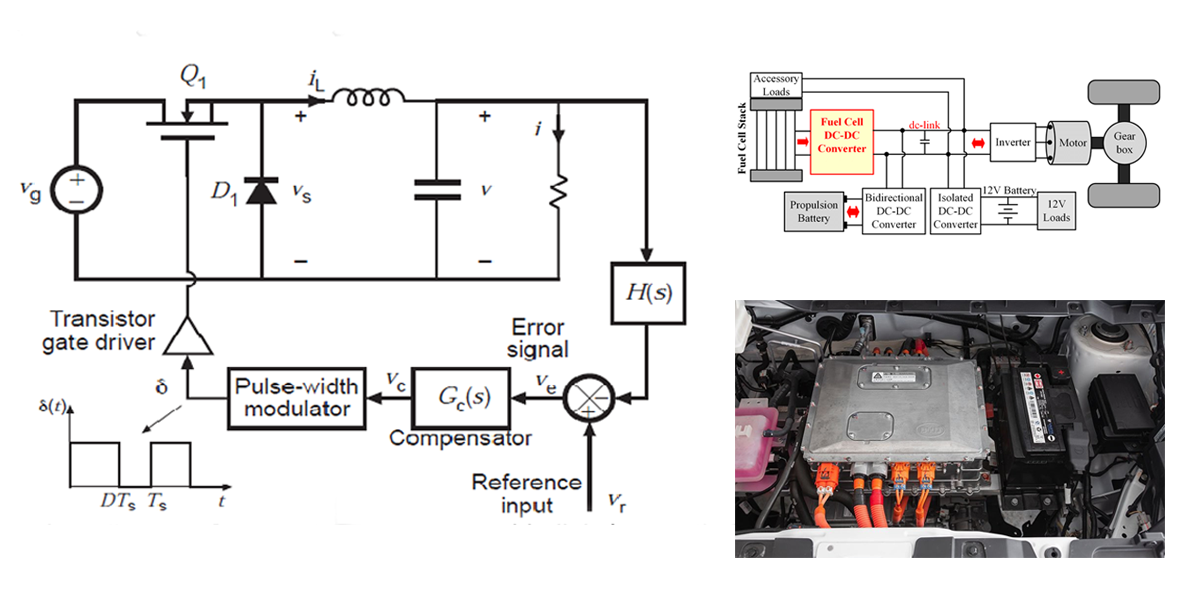
วงจรไฟฟ้าพื้นฐานของ DC-DC Converter แสดงได้ดังนี้

DC-DC Converter จะทำหน้าที่เปลี่ยนแรงดันไฟฟ้า DC จากแหล่งจ่ายที่มีค่าคงที่ ให้ได้แรงดัน DC ขาออก ที่สามารถปรับค่า โดยใช้หลักการ ON และ OFF อิเล็กทรอนิกส์สวิตซ์ เช่น IGBT/MOSFET หรือ เรียกกระบวนการนี้ว่า Chopping DC Voltage ในการ ON-OFF อิเล็กทรอนิกส์สวิตซ์มักนิยมใช้วงจร Pulse Width Modulation(PWM) ทำหน้าที่เปิดปิดอิเล็กทรอนิกส์สวิตซ์ อย่างไรก็ตามแรงดันไฟฟ้าเอาพุตที่ได้จะมีขนาดน้อยกว่าแรงดันไฟฟ้าอินพุต นอกจากนี้แล้ว L-C Filter จะถูกนำมาร่วมใช้ในวงจรเพื่อทำให้สัญญาณแรงดันขาออกมาความราบเรียบ
เราการออกแบบวงจร DC-DC Converter ภายใต้เงื่อนไขดังนี้
- อินพุต 12VDC และให้แรงดันขาออกเฉลี่ย 5VDC
- Output peak-peak ripple = 20 mV
- Inductor current ripple = 0.8 A
จาก Kirchof Current Law จะได้ว่า
(1)
ย้ายข้างสมการ (1) จะได้
(2)
แทนค่าเงื่อนไขการออกแบบลงในสมการ (2) จะได้
จาก Kirchof Current Law จะได้ว่า
(3)
ย้ายข้างสมการ (3) จะได้
(4)
แทนค่าเงื่อนไขการออกแบบลงในสมการ (4) จะได้
\(f\) = chopping frequency
การจำลองการทำงานของ DC-DC Converter โดย Matlab/Simulink จะประกอบไปด้วย 2 ส่วน
- วงจร DC-DC Converter จะใช้ค่าที่ได้จากคำนวณข้างต้นในการออกแบบ
- ส่วนตัวควบคุมแบบพีไอ (PI Controller) จะทดลองกำหนดค่าแล้วปรับเปลี่ยนเพื่อให้ได้ผลตอบสนองที่เหมาะสม
วงจร DC-DC Converter จะประกอบด้วย
- แรงดันไฟฟ้าอินพุตคง = 12 VDC
- สัญญาณแรงดันไฟฟ้าอ้างอิง = 5VDC
- ตัวต้านทาน(R) = 14 Ohm
- ตัวเหนี่ยวนำ (L) = 0.146mH
- ตัวเก็บประจุ (C) = 200 uF
ตัวควบคุมแบบพีไอ (PI Controller)
- ค่า Kp = 0.001
- ค่า Ki = 10
เราจะนำพารามิเตอร์ข้างต้นสร้างเป็นจำลองการทำงานของวงจร DC-DC Converter โดยใช้ PI Controller เป็นตัวควบคุมส่งสัญญาณให้แก่ วงจร Pulse Width Modulation เพื่อทำหน้าที่เปิดปิดสวิทซ์อิเล็กทรอนิกส์ และนำแรงดันขาออกที่ได้จาก DC-DC Converter ป้อนกับเข้าไปยัง PI Controller เป็นการควบคุมแบบปิด (Close Loop Control) แสดงได้ดังรูป

จากการ Simulation เราจะได้ แรงดันไฟฟ้าขาออกอยู่ที่ 5VDC แต่พบว่ามี Ripple ปนมาในแรงดันขาออก ทำให้แรงดันไฟฟ้าขาออกมีการแกว่งไปมาอยู่ที่ 3-5% ทั้งนี้ขึ้นอยู่กับการออกแบบ L-C Filter ที่จะใช้ในการกรองสัญญาขาออก

สามารถดาวน์โหลด Matlab/Simulink file ได้ทีนี่