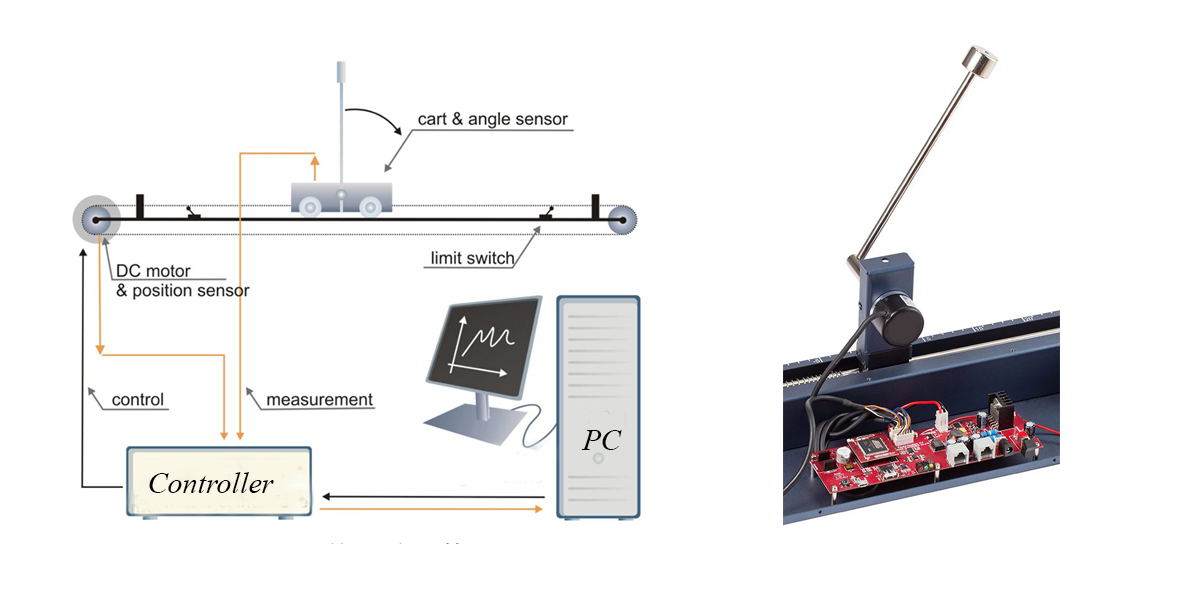
จากบล๊อกก่อนหน้านี้ เราได้ศึกษาการหา State Model ของลูกตุ้มกลับหัวกลับไปแล้ว (Inverted Pendulum) https://csys.pro/mimo/2880/ เราจะทดลองเพิ่มตัวควบคุม Linear Quadratic Regulator ซึ่งเป็นคอนโทรลเลอร์ที่มีใช้งานกันอย่างแพร่หลายในระบบการควบคุมที่มีความซับซ้อนแบบ Multiple Inputs/Multiple Outputs (MIMO)
State Space model สามารถเขียนในรูปสมการได้ดังนี้
(1)
เพื่อให้ระบบเป็นการควบคุมแบบป้อนกลับ จะได้ว่า
(2)
จากสมการ (1) และ (2) สามารถเขียน Block diagram ได้เป็น

แทนสมการ (2) กลับเข้าไปในสมการ (1) จะได้
(3)
จากสมการ (3) จะเห็นว่า State Equation มีการเปลี่ยนแปลงไป ค่า K ที่เพิ่มเข้าไปมีผลต่อผลตอบสนองของระบบ ซึ่งการหาค่า K เหมาะสมจะทำให้ระบบมีเสถียรภาพและให้ผลตอบสนองตามที่ผู้ออกแบบต้องการ
การหาค่า K มีหลายวิธี ในบล๊อกนี้จะใช้วิธีการ Linear Quadratic Regulator
เราจะเริ่มที่การวิเคราะห์ว่าระบบที่เราจะควบคุม มีเสถียรภาพหรือไม่ โดยการวิเคราห์ตำแหน่งของโพล จาก Open Loop Transfer function ของ Inverted Pendulum จาก State Space Model ที่ได้ศึกษาไปก่อนหน้านี้ โดยมีตัวอย่างคำสั่ง Matlab ดังนี้
M = 0.5;
m = 0.2;
b = 0.1;
I = 0.006;
g = 9.8;
l = 0.3;
p = I*(M+m)+M*m*l^2;
A = [0 1 0 0;
0 -(I+m*l^2)*b/p (m^2*g*l^2)/p 0;
0 0 0 1;
0 -(m*l*b)/p m*g*l*(M+m)/p 0];
B = [ 0;
(I+m*l^2)/p;
0;
m*l/p];
C = [1 0 0 0;
0 0 1 0];
D = [0;
0];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'u'};
outputs = {'x'; 'phi'};
sys_ss = ss(A,B,C,D,'statename',states,'inputname',inputs,'outputname',outputs);
poles = eig(A)
จะ Script ข้างต้น Matlab จะให้ผลลัพธ์ออกมาเป็นตำแหน่งโพลของระบบดังนี้

ซึ่งจะพบว่ามีโพล 2 ตัวที่ทำให้ระบบไม่มีเสถียรภาพ ตัวแรกอยู่ที่ตำแหน่ง 0 ซึ่งอยู่บนแกนจินตภาพของ Complex plan ทำให้ระบบเกิดการ Oscilation หรือหากมี Uncertainites เพียงเล็กน้อยจะทำให้ระบบไม่มีเสถียรภาพทันที และโพลที่ตำแหน่ง 5.5651 เป็นโพลที่อยู่ด้านขวาของ Complex plan ซึ่งมีผลทำให้ระบบไม่มีเสถียรภาพ
ต่อมาเราจะมีวิเคราะห์คุณสมบัติของระบบว่าสามารถควบคุมได้(controllable) หรือไม่ โดยการวิเคราะห์ค่า Rank ของเมตริคความคุมได้ จะต้องเป็น Full Rank ในที่นี้สมการเสตทของ Inverted Pendulum เป็น matrix 4×4 ดังนั้นค่า Rank ของ Controlability Matrix จะต้องเป็นค่า 4
Controlability matrix สามารถเขียนได้ดังนี้
(4)
สามารถใช้คำสั่ง Matlab ทำการคำนวณได้ดังนี้
co = ctrb(sys_ss);
controllability = rank(co)
ต่อมาเราจะดำเนินการหาค่า K โดยจะเริ่มที่การพิจารณา Cost function
(5)
ในทางทฤษฎีสิ่งที่จะต้องทำกับสมการ (5) คือการ minimized ในกรณี Inverted Pendulum เป็นระบบที่มีสมการเสตท 4 ตัว และมี 1 อินพุต ดังนั้น Q จะเป็น Matrx 4×4 และ R จะเป็นค่า Scalar การปรับค่าทั้งสองมีผลต่อค่า K โดยค่า K จะมีขนาดใหญ่ ถ้า Q มีขนาดใหญ่ ในทางตรงข้าม ค่า R ที่มากจะทำให้ค่า K ลดลง
ในการหาค่า K เราจะต้องหา Matrix S ก่อน ซึ่งหาได้จากการแก้สมการ Algrebriac Ricatti Equation (ARE) ดังนี้
(6)
เมื่อได้ Matrix S สามารคำนวนหาค่า K ได้ดังสมการ
(7)
การคำนวนณทั้งหมดสามารถทำได้โดยใช้ Matlab script ดังนี้
ทดสอบโดยใช้ค่า R=1 ค่า Q คงเดิม
Q = C'*C;
R = 1;
K = lqr(A,B,Q,R)
Ac = [(A-B*K)];
Bc = [B];
Cc = [C];
Dc = [D];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'r'};
outputs = {'x'; 'phi'};
sys_cl = ss(Ac,Bc,Cc,Dc,'statename',states,'inputname',inputs,'outputname',outputs);
t = 0:0.01:5;
r =0.2*ones(size(t));
[y,t,x]=lsim(sys_cl,r,t);
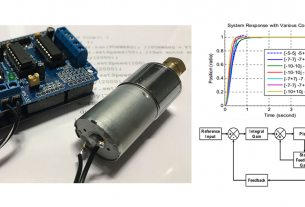
[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),'plot');
set(get(AX(1),'Ylabel'),'String','cart position (m)')
set(get(AX(2),'Ylabel'),'String','pendulum angle (radians)')
set(H1, 'Color', 'r');
set(H2, 'Color', 'b');
title('Step Response with LQR Control')
จะได้ผลลัพธ์ K=-1.0 -1.6567 18.6864 3.4594 และผลตอบสนองของระบบเมื่อใช้ K ดังกล่าวในระบบควบคุมแบบปิด เป็นดังนี้

ทดสอบโดยใช้ค่า R=1 ค่า Q เป็นดังนี้
โดยมี Matlab script ดังนี้
Q = C'*C;
Q(1,1) = 5000;
Q(3,3) = 100
R = 1;
K = lqr(A,B,Q,R)
Ac = [(A-B*K)];
Bc = [B];
Cc = [C];
Dc = [D];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'r'};
outputs = {'x'; 'phi'};
sys_cl = ss(Ac,Bc,Cc,Dc,'statename',states,'inputname',inputs,'outputname',outputs);
t = 0:0.01:5;
r =0.2*ones(size(t));
[y,t,x]=lsim(sys_cl,r,t);
[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),'plot');
set(get(AX(1),'Ylabel'),'String','cart position (m)')
set(get(AX(2),'Ylabel'),'String','pendulum angle (radians)')
title('Step Response with LQR Control')
จะได้ผลลัพธ์ K=-70.7107 -37.8345 105.5298 20.9238 และผลตอบสนองของระบบเมื่อใช้ K ดังกล่าวในระบบควบคุมแบบปิด เป็นดังนี้

ดาวน์โหลด Matlab script ได้ทีนี่