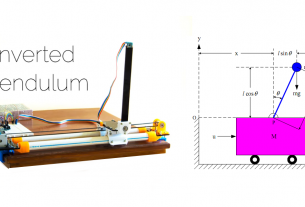
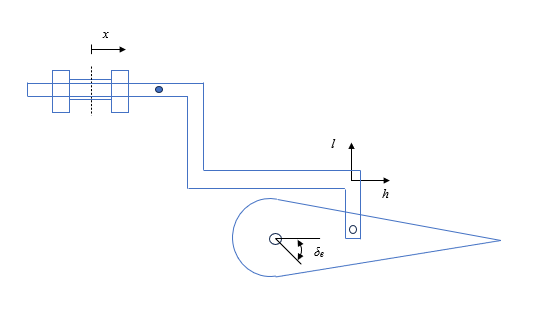
ระบบปีกยกตัวของเครื่องบินจะถูกติดตั้งอยู่ปลายปีกด้านหลัง เพื่อช่วยในการรักษาระดับการบิน (Aircraft’s horizontal stabilizer) แสดงได้ดังรูปที่ 1 การหมุนปลีกยกตัวจะใช้ต้นกำลังเป็นกระบอกสูบไฮดรอลิก ผ่าน mechanical link เพื่อสร้างมุม \(\delta_{e}\)
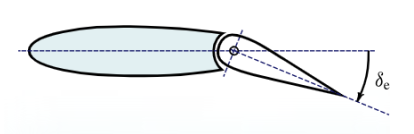
ในการหาสมการพลศาสตร์จะต้องวางแกนอ้างอิง(Generalized coordinate) 3 จุด แสดงดังรูปที่ 2
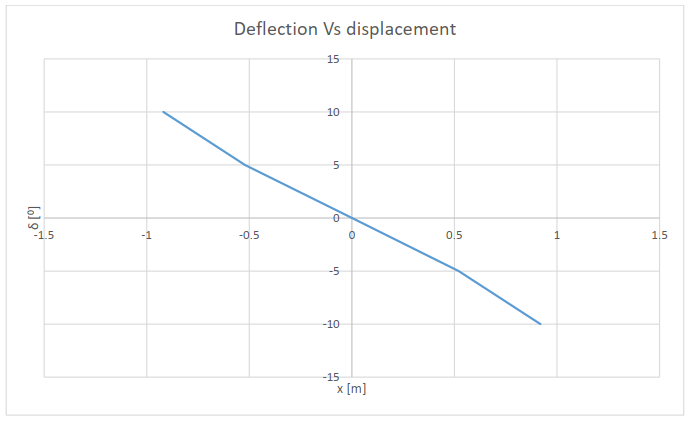
บันทึกการทดลองการเคลื่อนที่ของกระบอกสูบในแนวแกน x จะทำให้เกิดการหมุน อยู่ระหว่าง -15 ถึง 15 องศา แสดงได้ดังกราฟในรูปที่ 3
แบบจำลองทางพลศาสตร์ของระบบ สามารถหาได้จาก Free body diagram แสดงได้ดังรูปที่ 4
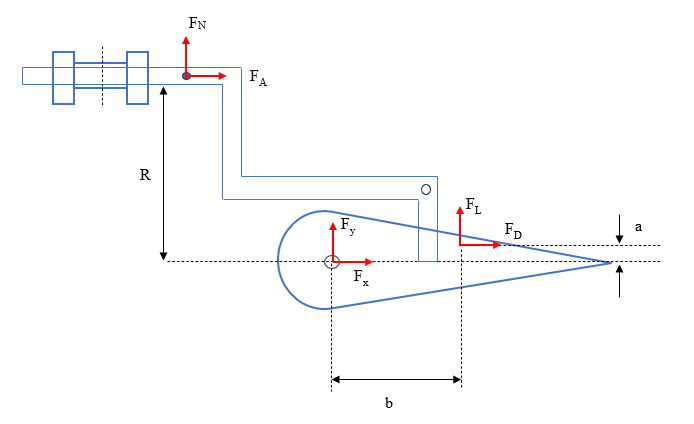
จากรูปที่ 4 จะได้สมการดังนี้
(1)
(2)
(3)
จัดรูปสมการ (1) จะได้
(4)
จัดรูปสมการ (2) จะได้
(5)
จัดรูปสมการ (3) จะได้
(6)
แรงที่เกิดจากอากาศไหลผ่านปีกเครื่องบินแสดง ได้ดังนี้
(7)
(8)
(9)
(10)
แทนค่าสมการ (7) (8) (9) (10) ลงใน (6) เราจะทราบแรงที่กระบอกสูบจะต้องสร้างเพื่อสร้างมุม \(\delta_{e}\) ดังนี้
(11)
โดยที่
\(\varrho\)=1.225 kg/m^3
s=62.35 m^2
e=0.7
AR=7.5
a=0.214 m
R=0.9 m
b=0.411 m
ระบบไฮดรอลิกอันเป็นกำลังแสดงได้ดังรูปที่ 4
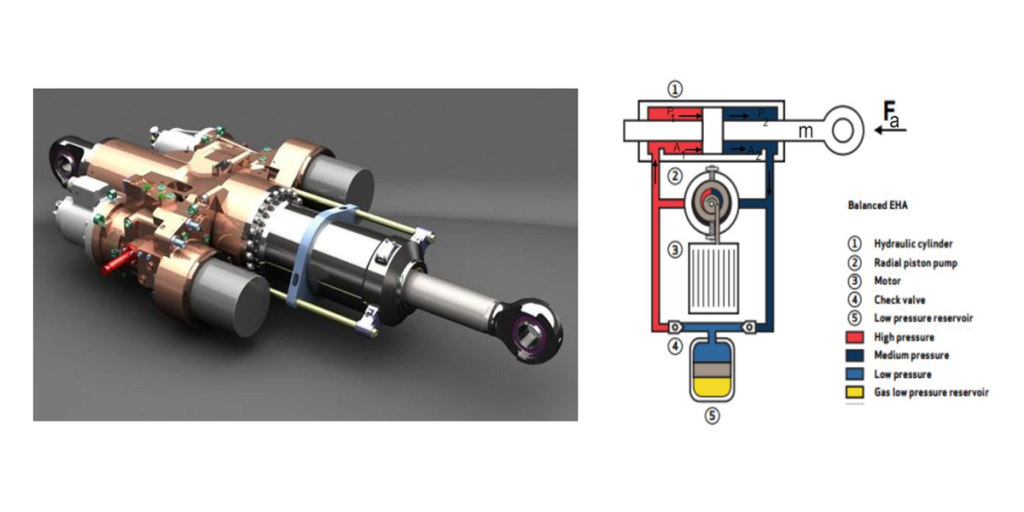
ผู้สนใจรายละเอียดสามารถศึกษาเพิ่มเติมได้จากบล๊อก System Identification เซอร์โวไฮดรอลิก และแบบจำลองทางพลศาสตร์การควบคุมแบบปิด โดย Matlab/Simulink
สมการพลศาสตร์ของกระบอกสูบสามารถเขียนเป็นสมการได้ดังนี้
(12)
จัดรูปสมการ (12) ในเทอมของผลต่างความดัน จะได้
(13)
แทนสมการ (11) ลงใน (13) จะได้สมการพลศาสตร์ของการเคลื่อนที่กระบอกสูบ
(14)
รูปที่ 3 และ สมการ (14) จะถูกนำไปทำการพล๊อตกราฟแล้วหาความสัมพันธ์ออกมาในรูปของ Function โดยใช้การ รัน Matlab script ดังนี้
%%%%%%geometry and geometry paramters%%%%%%
sigma=[-15:1:15]
h=0.5;
x=h*(sind(sigma));%%displacement
plot(sigma,x)
ylabel('x')
xlabel('sigma')
v=[180:5:330]%%range of velocity with an interval of 5
density=1.225;
a=0.214;
R=0.9;
b=0.411;
e=0.7;
AR=7.5;
%%%%Matrix formation of Force in for loop%%%%
m=size(sigma,2);
n=size(v,2);
F=zeros(m,n);
for i= 1:m
for j= 1:n
F(i,j)=(((0.5*density*(v(j)*v(j))/R)*((((5.5*sigma(i))+0.29)*b)-((((30.25*(sigma(i)*sigma(i)))+(3.19*sigma(i))+0.0841)*a)/(pi*AR*e)))));
end
end
plot(sigma,F)
ylabel('F')
xlabel('sigma')
%%%%actuator and it's paramters%%%%
mass=12.3;
A1=0.00292;
A2=0.000633;
p0=2.0684*(10^7);
deltaP=1.724*(10^6);
mesh(F)
ทำการสร้างและรันคอนโทรลบล๊อกไดอะแกรมบนโปรแกรม Simulink ดังนี้
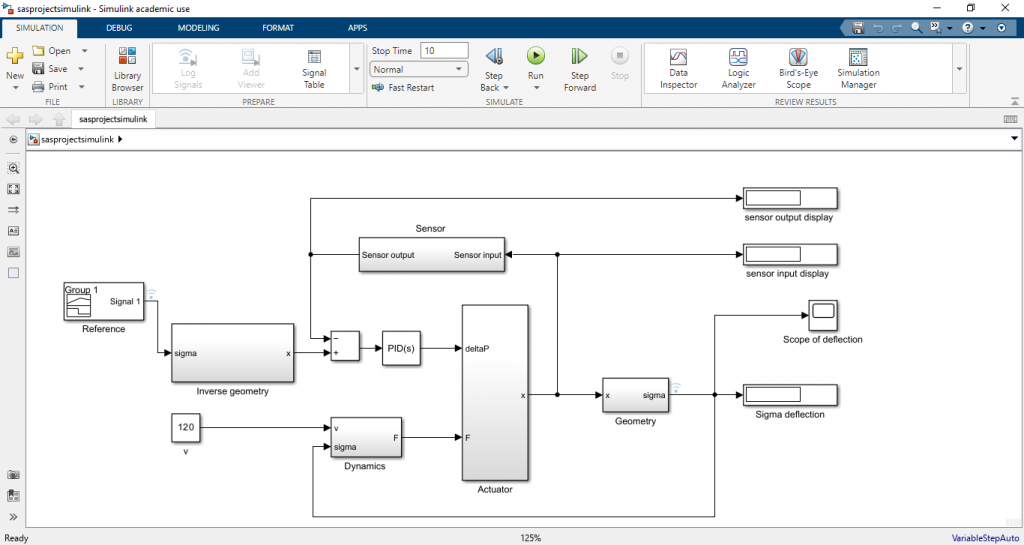
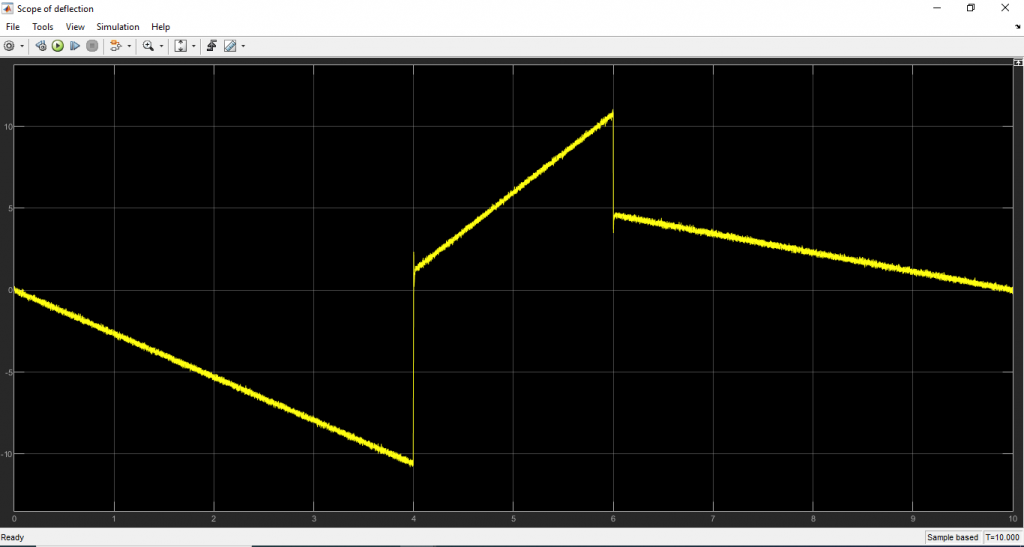
โดยจะให้ผลลัพธ์เป็นผลตอบสนองของระบบยกตัวและรักษาระดับการบิน ดังนี้
โหลด Matlab/Simulink file ได้ที่นี่