ในการใช้งาน DC Motor เรามักจะใช้ PI Controller + Pulse Width Modulation + Power Amp + DC Motor โดยให้ PWM เป็นตัวจ่ายสัญญาณให้แก่วงจรเพาเวอร์แอมป์ เพื่อขับดีซีมอเตอร์ ในบล็อกนี้เราจะศึกษา องค์ประกอบการควบคุม DC Motor ที่นิยมนำไปประยุกต์ใช้งานในทางปฏิบัติ
ในการศึกษาบล๊อกนี้เราจะใช้พื้นฐานจากบล๊อกก่อนหน้าดังนี้
พัลส์วิดมอดูเลชั่นเทคนิค(Pulse width modulation) โดย Matlab/Simulink เป็นความรู้พื้นฐานการจำลองการทำงานวงจร PWM
แบบจำลอง PI Controller + 24 โวลท์ ดีซีมอเตอร์ (24VDC Motor) มอเตอร์ไฟฟ้าที่พบเห็นบ่อยในงานวิศวกรรม โดย Matlab/Simulink เป็นความรู้พื้นฐานในการพัฒนาแบบจำลองดีซีมอเตอร์
1) DC Motor จะมีสมการพลศาสตร์พื้นฐานดังนี้
(1)
โดยที่ \(E_{b}=\phi k\omega {m}\)
และ
(2)
2) PI Controller แสดงได้ดังสมการ
(3)
3) พัลส์วิดมอดูเลชั่น (Pulse Width Modulation)
(4)
โดยที่ \(f=\frac{1}{T}\) และ \(T=On\; Time+Off\: Time\)
4) การออกแบบ
เราจะกำหนดให้ ความเร็วที่ต้องการเป็นสัญญาณอ้างอิง(Reference) และ สัญญาณป้อนกลับ(Feedback) เป็นความเร็วของมอเตอร์ที่เกิดขึ้นจริง เขียนเป็นสมการได้ดังนี้
(5)
สมการ (5) จะเป็นอินพุตให้แก่สมการพีไอคอนโทรลเลอร์ (3) เพื่อคำนวณหาสัญญาณควบคุม( Control Signal)
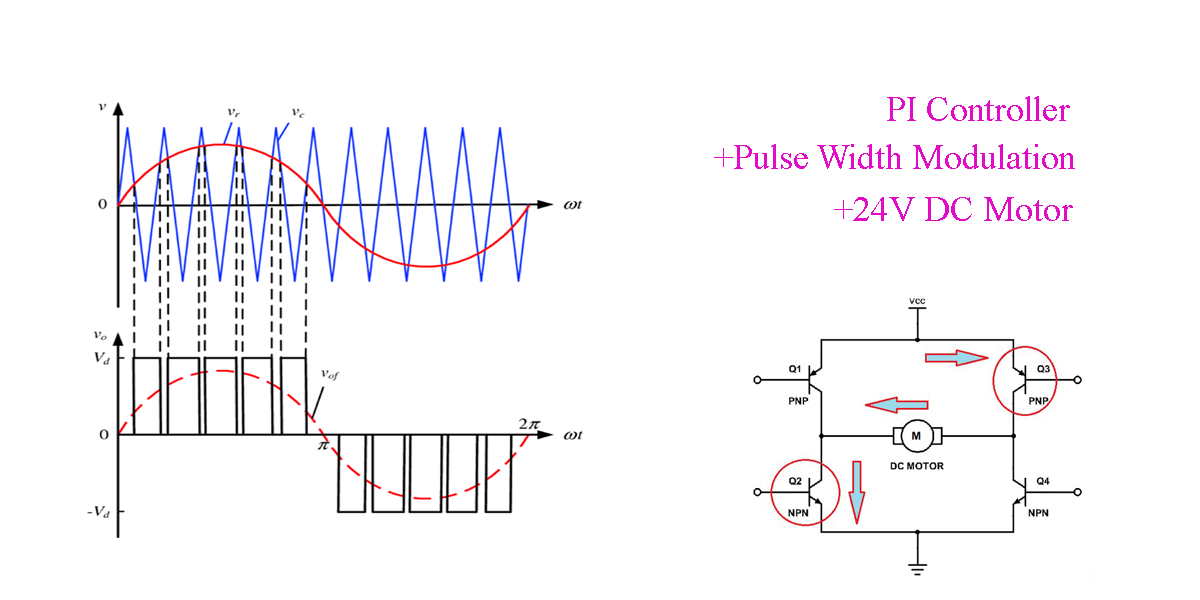
ค่า Maximum \(u(t)\) ของสัญญาณควบคุมที่ได้จากพีไอคอนโทรลเลอร์ในช่วงที่ระบบทำงานเป็นปกติแล้ว (Steady state period) จะถูกออกแบบให้มีขนาด 2 โวลท์ เพื่อใช้เป็นสัญญาณ Modulation กับ สัญญาณสามเหลียมที่มีแอมพลิจูด 2 โวลท์และมีความถี่ 1.0 kHz ในวงจร PWM ผลจากการมอดูเลทจะให้สัญญาณพัลส์ดังแสดงในรูปที่ 1
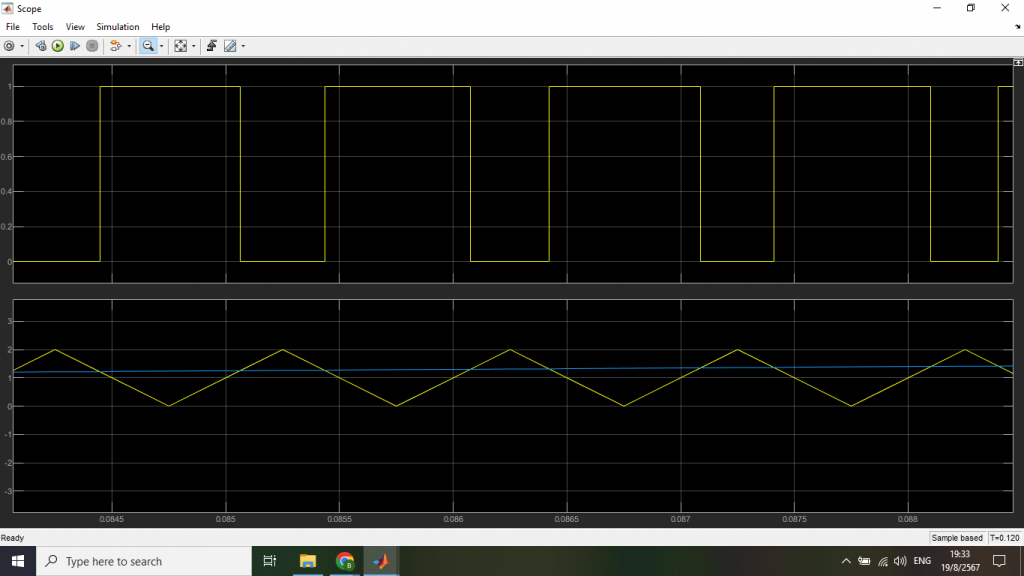
จากรูปที่ 1 จะเห็นว่า \(u(t)\) ยิ่งมากจะสร้างสัญญาณพัลส์ที่มีค่า Duty Cycle มากขึ้นไปด้วย และถ้า \(u(t)>2\) จะทำให้สัญญาณพัลส์มี Duty Cycle=100% สัญญาณคลื่นสี่เหลี่ยมที่ได้จะมีขนาด 1 โวลท์ สัญญาณนี้เองจะถูกใช้เป็นสัญญาณขับนำ(Trig) อุปกรณ์อิเล็กทรอนิกส์กำลัง ดังแสดงในรูปที่ 2

ในแบบจำลอง Simulink เราจะจำลองวงจร Full Bridge IGBT เป็นเพียงอัตราขยายขนาด 24 โวลท์เท่านั้น ทั้งนี้ก็เพราะสัญญาณที่ได้จากวงจร PWM และ สัญญาณที่ได้จากวงจร Full Bridge IGBT มีสัญญาณที่เหมือนกัน ต่างกันที่ขนาดเอาพุตจากวงจร Full Bridge IGBT จะมีขนาด 24VDC
จำลองการทำการทำงานบนโปรแกรม Simulink โดยสร้างบล๊อกคอนโทรลไดอะแกรม ดังภาพ

ผลการซิมูเลชั้น โดยให้ Step Input มีขนาด 10 rad/s และเมื่อ t=20 Sec. จึงลดขนาดเป็น 5 rad/s จะได้ผลลัพธ์ดังนี้

ดาวน์โหลดไฟล์ได้ที่นี่