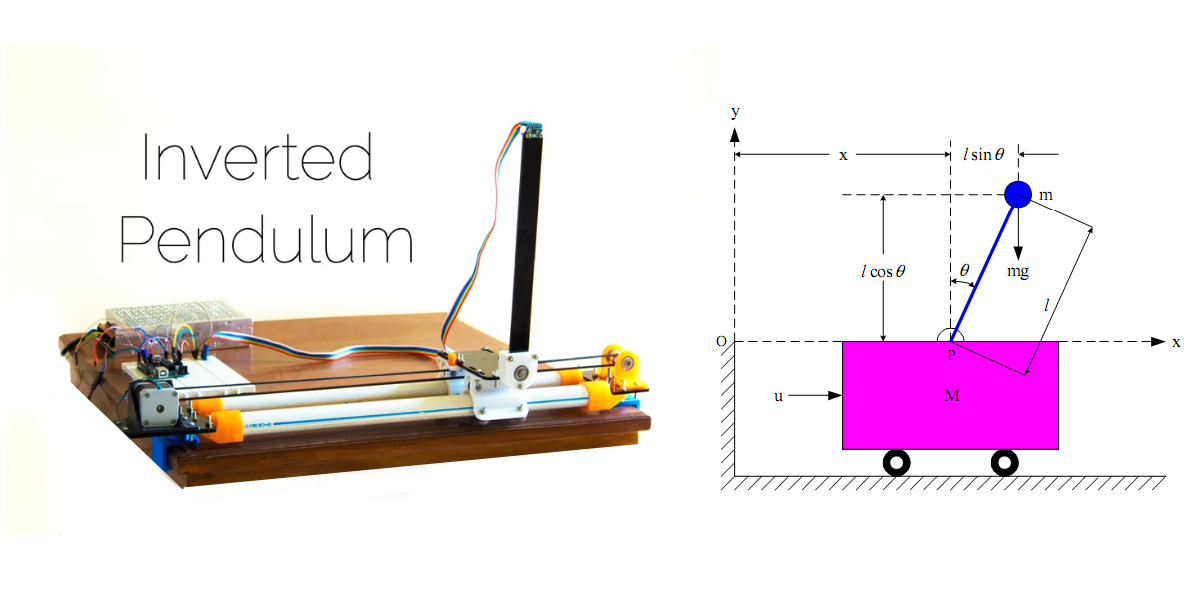
จำลองการควบคุม Inverted Pendulum โดยตัวควบคุมแบบ PID บนโปรแกรม Matlab/Simulink
Inverted Pendulum เป็นระบบพลศาสตร์ พื้นฐานสำหรับการศึกษาวิชา Control Systems ในงานชิ้นนี้จะนำเสนอการจำลองการควบคุม Inverted Pendulum เบื้องต้น โดยใช้แบบจำลองที่เป็นเชิงเส้น(Linearization) สามารถเขียน Free body diagram แยกออกจากกัน 2 ชิ้น ได้ดังนี้
Continue Reading