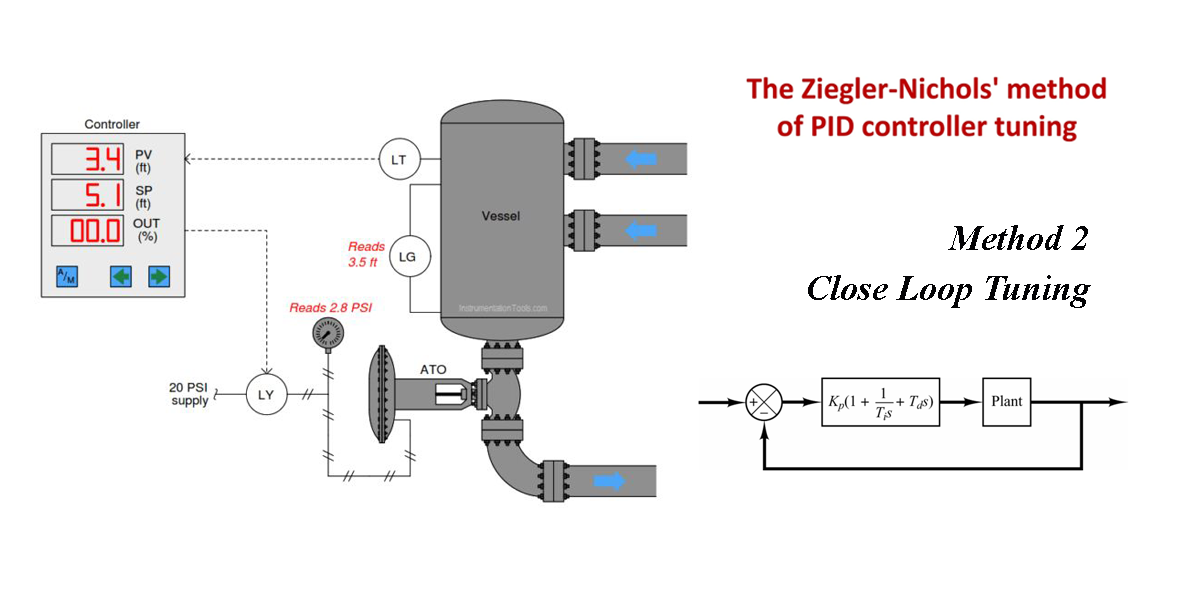
Ziegler-Nicoles วิธีที่ 2 ปรับแต่ง PID ในขณะมีการป้อนกลับ (Close Loop Tuning) แต่ไม่ทราบสมการพลศาสตร์ของระบบ
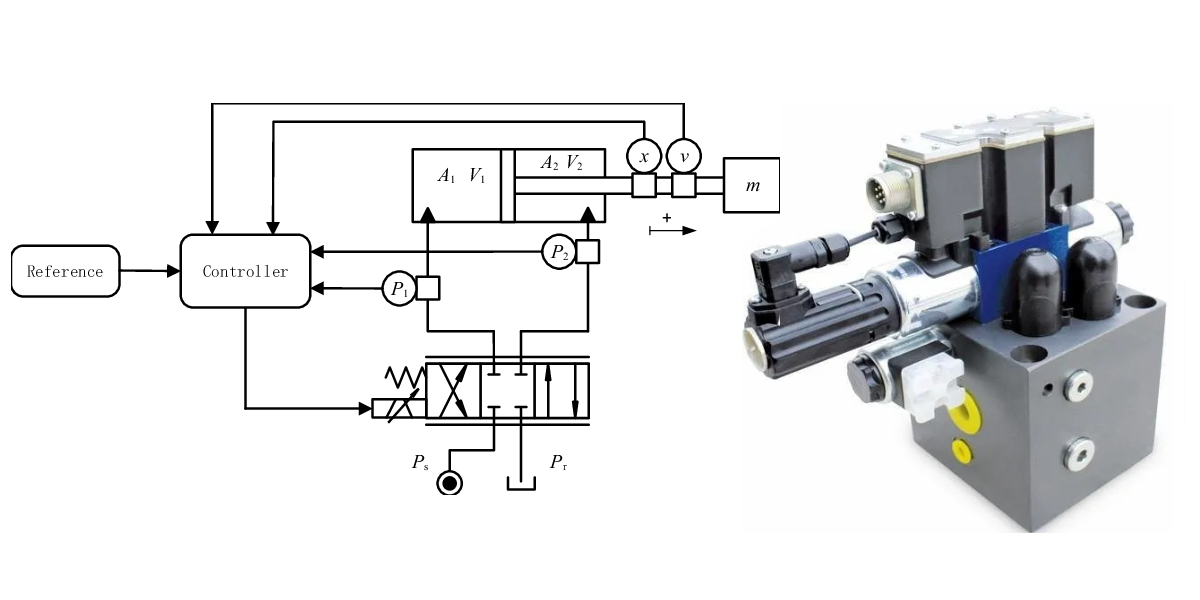
ในบล๊อกนี้เราจะศึกษา Ziegler-Nicoles Method 2 ซึ่งจะสามารถหาค่าพารามิเตอร์ PID โดยไม่จำเป็นต้องทราบสมการพลศาสตร์ของระบบ ในขณะที่ระบบยังมีการทำงานแบบวงปิด(Close Loop) โดยปกติแล้วระบบป้อนกลับ (Feedback control) ที่มีตัวควบคุม PID จะแสดงได้ดังรูปที่ 1
Continue Reading