State space model สำหรับวงจร RLC โดย Matlab
สมการสเตทของระบบพลศาสตร์ สามารถเขียน block diagram ได้เป็น จากบล๊อกไดอะแกรม สามารถเขียนเป็นสมการได้ว่า จัดรูปสมการ (2) ใหม่อีกครั้งเพื่อเป็นจากสมการอนุพันธ์อันดับสอง เป็นสมการสเตท
Continue Reading
สมการสเตทของระบบพลศาสตร์ สามารถเขียน block diagram ได้เป็น จากบล๊อกไดอะแกรม สามารถเขียนเป็นสมการได้ว่า จัดรูปสมการ (2) ใหม่อีกครั้งเพื่อเป็นจากสมการอนุพันธ์อันดับสอง เป็นสมการสเตท
Continue Reading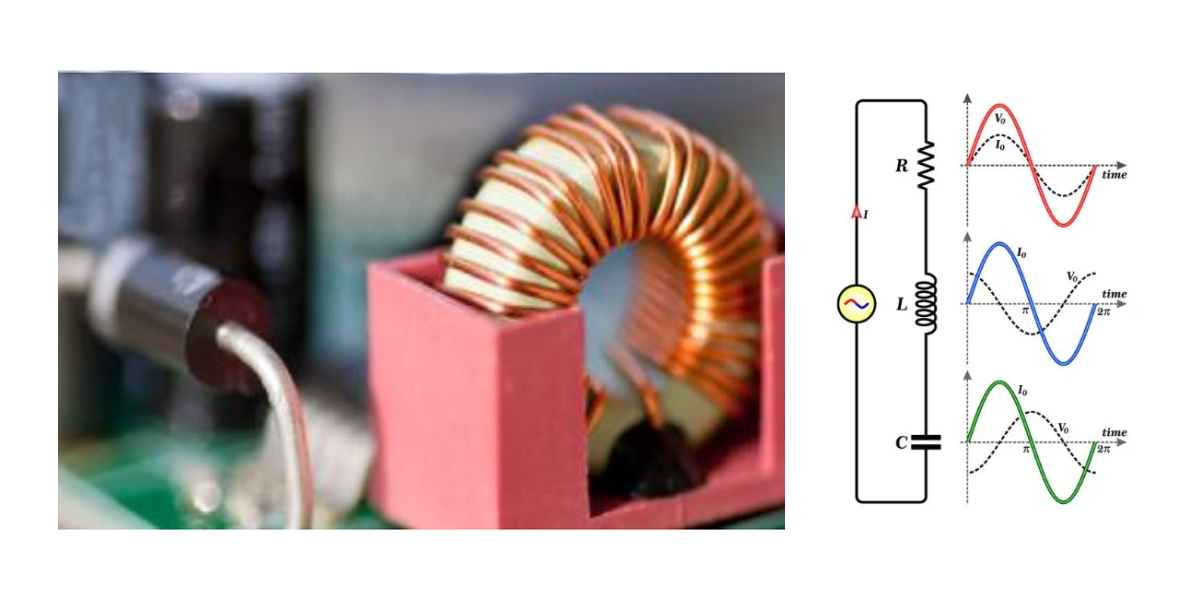
วงจร RLC อนุกรม สามารถเขียน circuit diagram ได้ดังนี้ เราจะสร้างแบบจำลองทางพลศาสตร์ของวงจรโดยกำหนดให้ V ค่าแรงดันไฟฟ้าอินพุต R ค่าความต้านทาน C ค่าสัมประสิทธิประจุกระแสไฟฟ้า L ค่าความเหนี่ยวนำ
Continue Reading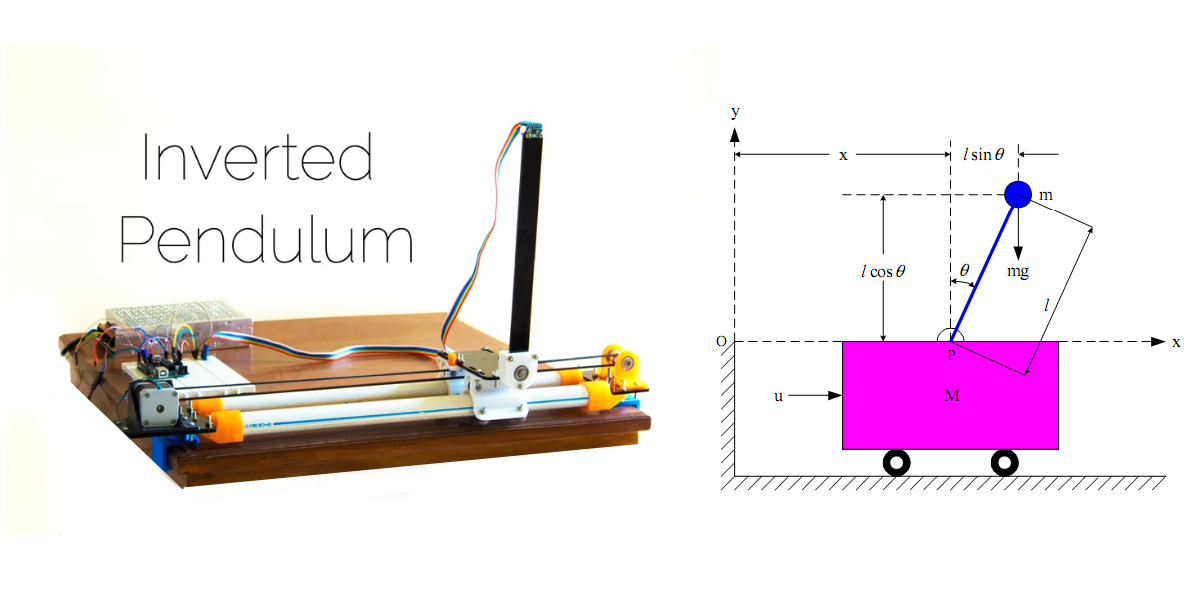
Inverted Pendulum เป็นระบบพลศาสตร์ พื้นฐานสำหรับการศึกษาวิชา Control Systems ในงานชิ้นนี้จะนำเสนอการจำลองการควบคุม Inverted Pendulum เบื้องต้น โดยใช้แบบจำลองที่เป็นเชิงเส้น(Linearization) สามารถเขียน Free body diagram แยกออกจากกัน 2 ชิ้น ได้ดังนี้
Continue Reading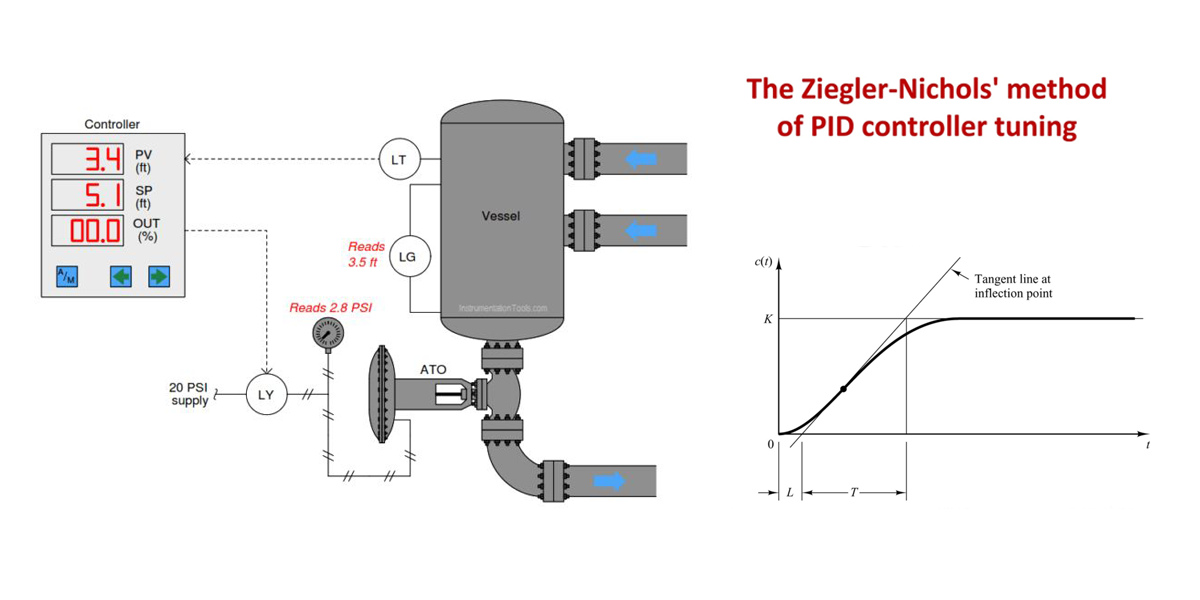
บ่อยครั้งเป็นเรื่องที่ยากที่จะหาแบบจำลองทางพลศาสตร์ของระบบ หรือไม่สามารถหา การปรับแต่งตัวควบคุมสามารถทำได้โดยใช้ Ziegler-Nichols Method Ziegler-Nichols Method มีให้เลือกใช้ 2 วิธี คือ The first method และ The second method ในงานชิ้นนี้จะนำเสนอการปรับแต่งตัวคุมคุม โดยใช้ The first method
Continue Reading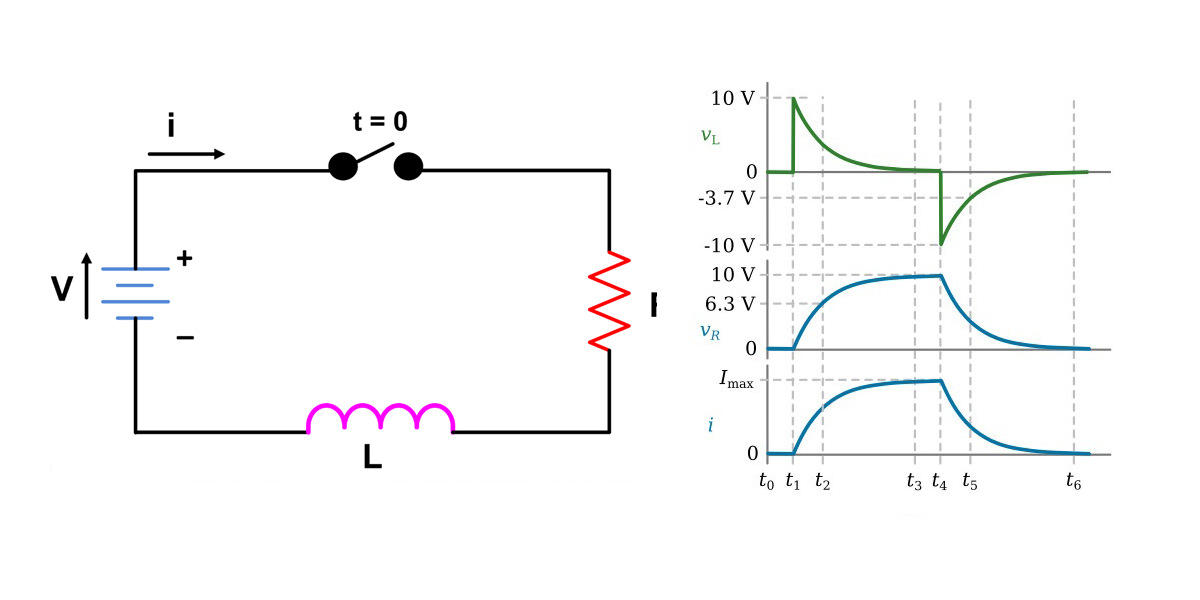
วงจร RL เป็นระบบพลศาสตร์ทางไฟฟ้าที่มีอนุพันธ์อันดับหนึ่ง ในการศึกษาการควบคุมระบบพลศาสตร์ของ วงจร RL เราสามารถเขียน circuit diagram แต่ทั้งนี้เราจะใช้โปรแกรม Simulink ในการหาผลตอบสนองของระบบ จัดรูปสมการ (1)
Continue Reading
การศึกษาระบบพลศาสตร์ของ Mass spring damped system เริ่มจากการพิจารณา free body diagram ของระบบ ประกอบไปด้วย มวล ปริง และ แดมเปอร์ ผลตอบสนองของระบบ ซึ่งแบ่งได้เป็น 4 กรณี
Continue Reading
Matlab ได้เตรียมเครื่องมือเอาไว้อย่างมากมายสำหรับงานด้าน Control Systems เราจะเริ่มด้วย จะเริ่มจาการสร้าง Transfer Function ย่อย ทั้ง 4 บล๊อก แล้วยุบรวมบจะได้ Close Loop Transfer Function
Continue Reading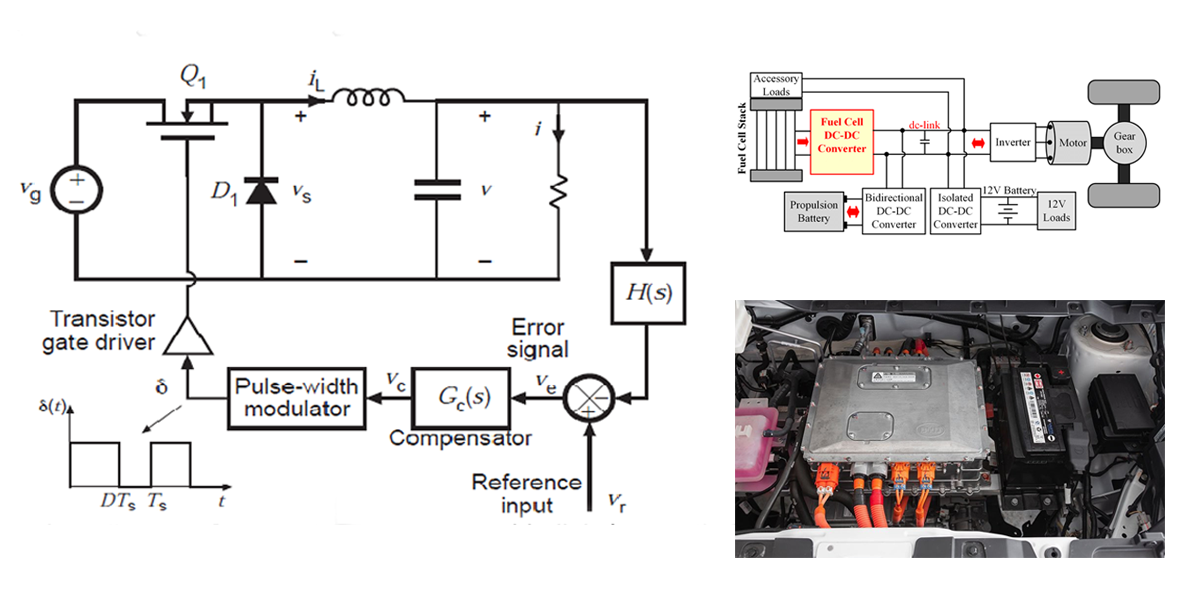
DC-DC Converter จะทำหน้าที่เปลี่ยนแรงดันไฟฟ้า DC จากแหล่งจ่ายที่มีค่าคงที่ ให้ได้แรงดัน DC ขาออก ที่สามารถปรับค่า โดยใช้หลักการ ON และ OFF อิเล็กทรอนิกส์สวิตซ์ เช่น IGBT/MOSFET หรือ เรียกกระบวนการนี้ว่า Chopping DC Voltage
Continue Reading
Root locus คือการศึกษาตำแหน่งของโพลทุกตำแหน่งบน Complex plane ที่ได้จากค่ารากของสมการคุณลักษณะเฉพาะเมื่อค่า K เปลี่ยนแปลงไป ซึ่งหากต้องการร่าง Root Locus ด้วยมือจะมีขั้นตอนและรายละเอียดเยอะพอสมควร
Continue Reading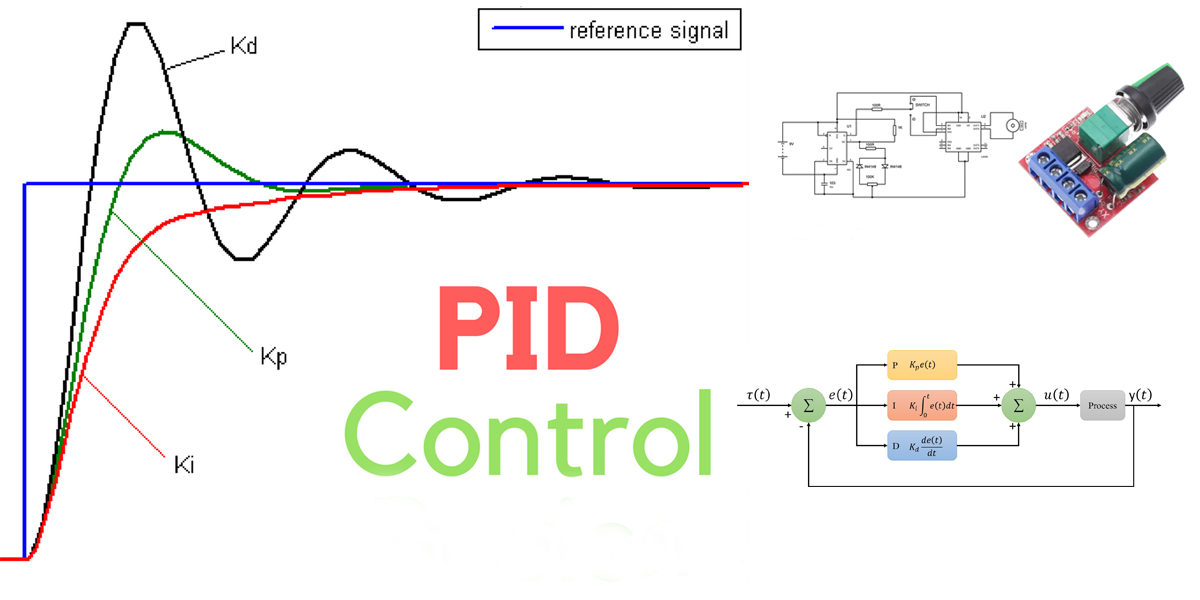
ตัวควบคุมแบบพีไอดี (PID Controller) คือตัวควบคุมกระบวนการที่เราสามารถออกแบบและใช้เพื่อควบคุมการทำงานระบบพลศาสตร์ให้มีผลตอบสนองตามที่เราต้องการ พีไอดี คอนโทรลเลอร์ ประกอบด้วยตัวควบคุมย่อย 3 ตัว
Continue Reading