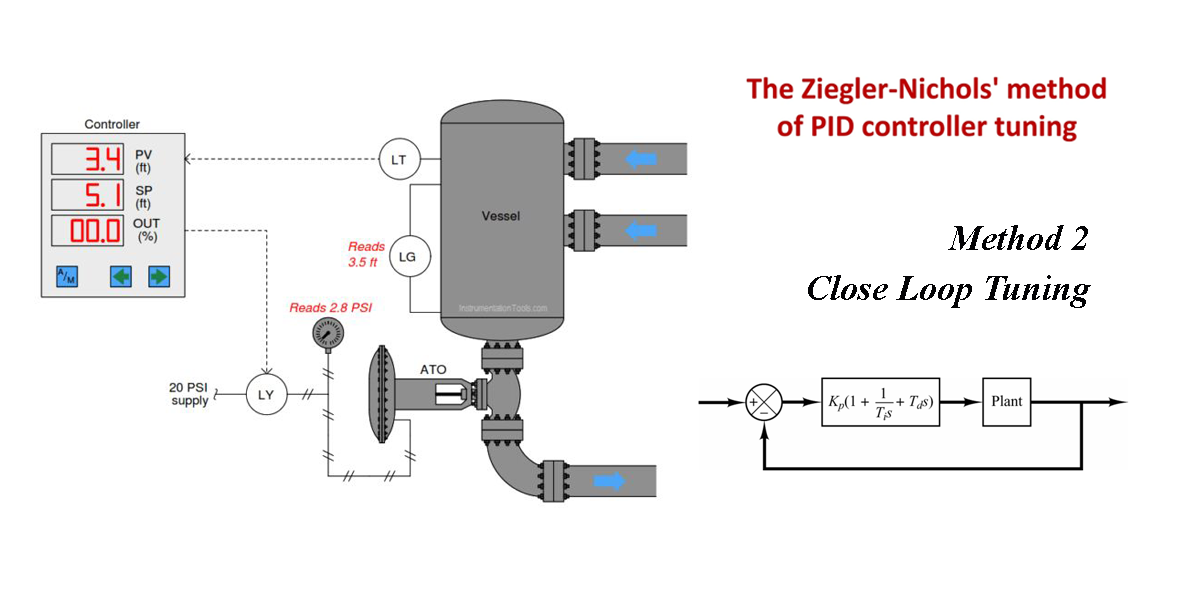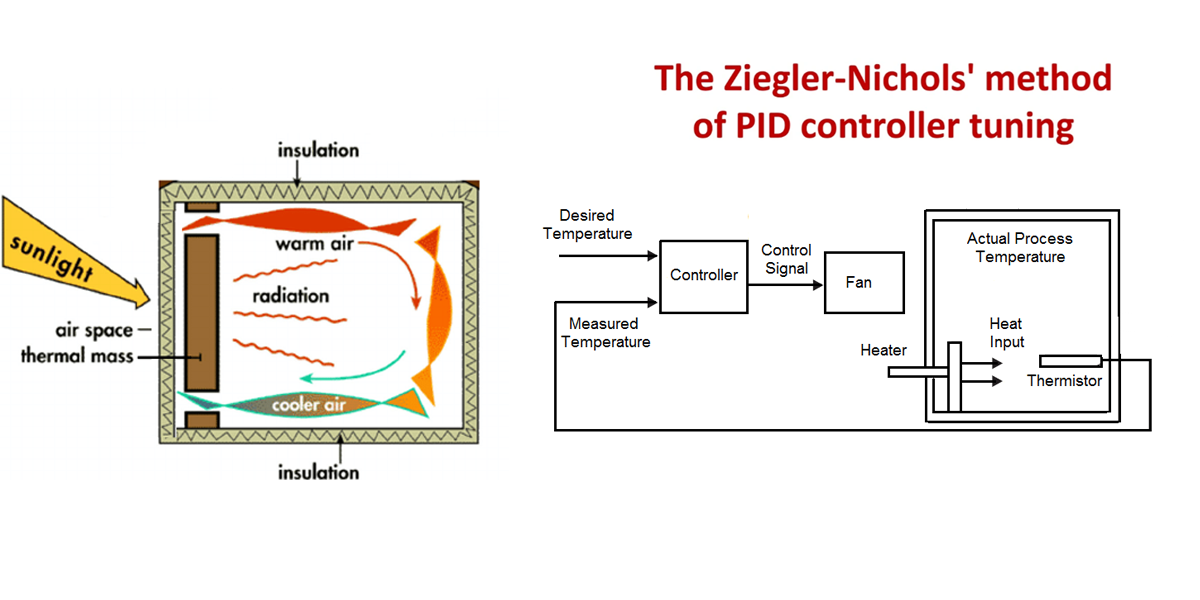
Ziegler Nicoles ออกแบบพีไอดี เพื่อควบคุมการถ่ายโอนความร้อน(Heat Transfer) เมื่อไม่มีข้อมูลใดๆ มาก่อนเลย
ระบบถ่ายโอนความร้อน (Heat Transfer) พบบ่อยในกระบวนการทางอุตสาหกรรม หากเราไม่ทราบสมการพลศาสตร์ของระบบ หรือแม้แต่ไม่ทราบการออกแบบเลย แต่มีความจำเป็นต้องหาติดตั้งตัวควบคุม PID เพื่อให้การถ่ายโอนความร้อนเป็นไปตามที่เราประสงค์ ก็สามารถทำได้โดยไม่ยากเกินไป
Continue Reading