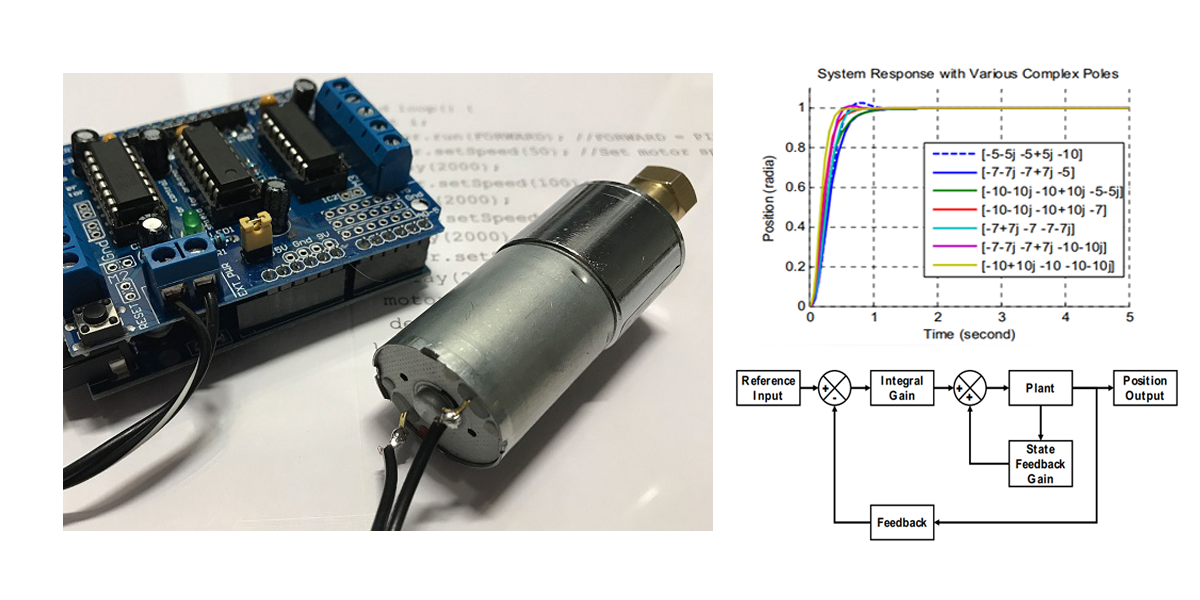
จำลอง การควบคุมตำแหน่ง(Position) ของดีซีมอเตอร์ ด้วยวิธี State Integral Control โดย Matlab/Simulink
การควบคุมตำแหน่งการหมุนของ DC Motor เป็นแอพพลิเคชั่นที่เรียกว่า เซอร์โวมอเตอร์ที่เราเห็นกันในอุตสาหกรรม เพราะโดยปกติแล้ววัตถุประสงค์หลักของการเลือกใช้เซอร์โว ก็เพื่อต้องการนำมาใช้ในการควบคุมตำแหน่งการหมุนเป็นหลัก
Continue Reading