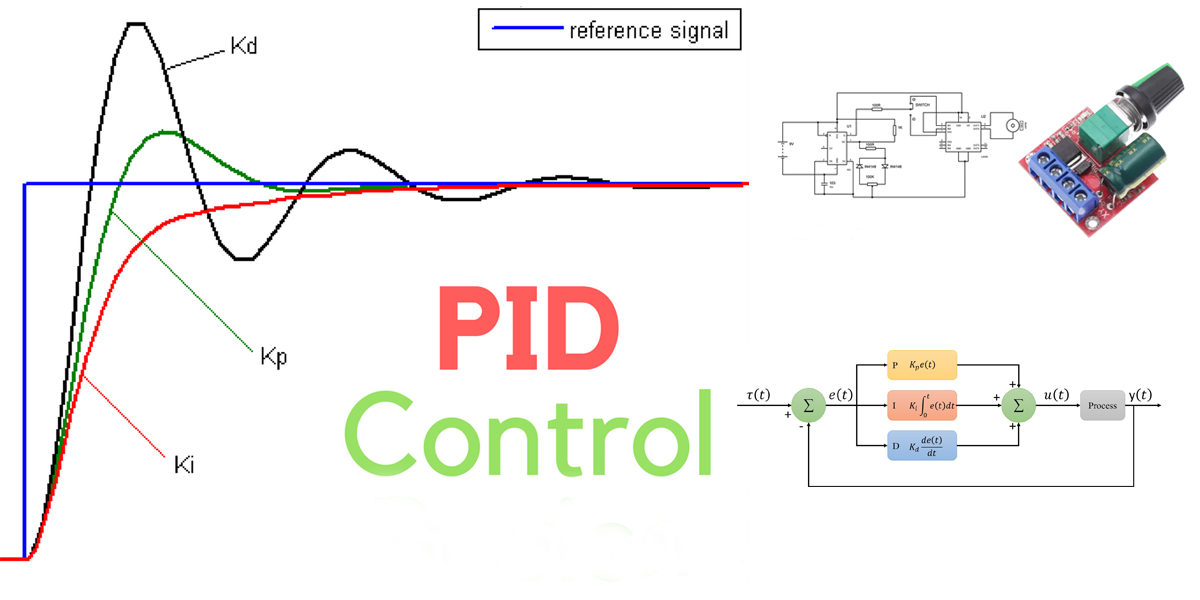
ตัวควบคุมแบบพีไอดี (PID Controller) คือตัวควบคุมกระบวนการที่เราสามารถออกแบบและใช้เพื่อควบคุมการทำงานระบบพลศาสตร์ให้มีผลตอบสนองตามที่เราต้องการ พีไอดี คอนโทรลเลอร์ ประกอบด้วยตัวควบคุมย่อย 3 ตัว คือ ตัวควบคุมแบบสัดส่วน (Proportional) , ตัวควบคุมแบบอินทริเกรท (Integral) และ ตัวควบคุมแบบอนุพันธ์ (Derivative) สามารถเขีนเป็นสมการทางคณิตศาสตร์ได้ว่า
(1)
ทำการ Take Laplace Transform สมการ (1) จะได้
(2)
จากสมการ (2) สามารถนำมาสร้างเป็น Simulink PID Controller ได้ดังนี้
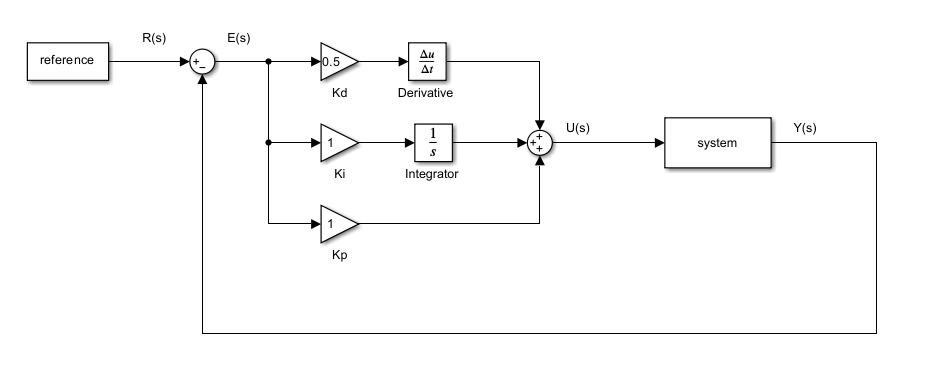
U(s) คือสัญญาณควบคุมที่จะนำไปใช้ในการควบคุมระบบ
E(s) = R(s) – Y(s) คือสัญญาณที่จะใช้ในการคำนวณสัญญาณควบคุมของคอนโทรลเลอร์
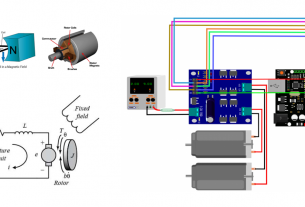
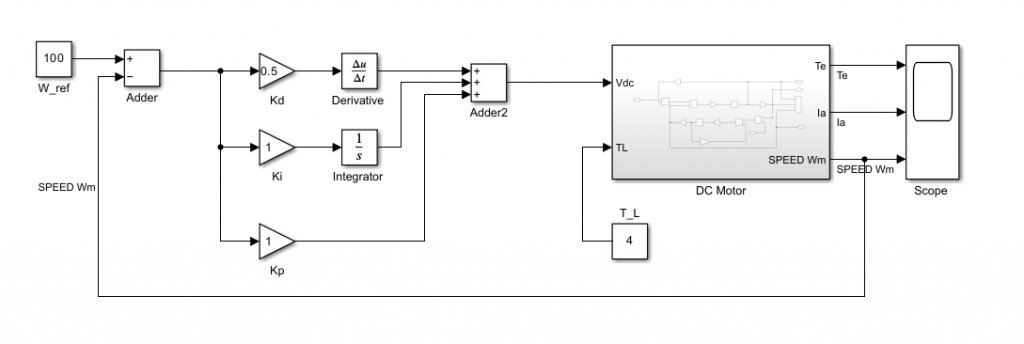
เราจะนำสัญญาณควบคุม U(s) ที่ได้จาก PID Controller ไปประยุกต์ใช้ในการควบคุมมอเตอร์ไฟฟ้ากระแสตรง(DC Motor) โดยนำไปจำลองการทำงานใน Matlab/Simulink ได้ดังนี้
รายละเอียดของการจำลอง มอเตอร์ไฟฟ้ากระแสตรง สามารถศึกษาเพิ่มเติมได้ที่ https://csys.pro/sim/2490/
จาก Simulink PID block diagram ในการควบคุมมอเตอร์ไฟฟ้ากระแสตรง เรากำหนดให้
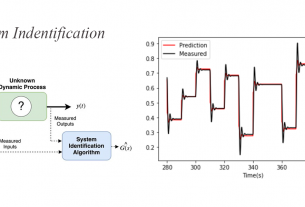
จากการจำลองการทำงานของตัวควบคุมแบบพีไอดี (PID Controller) ทำให้ได้ผลตอบสนองของระบบเป็นดังนี้
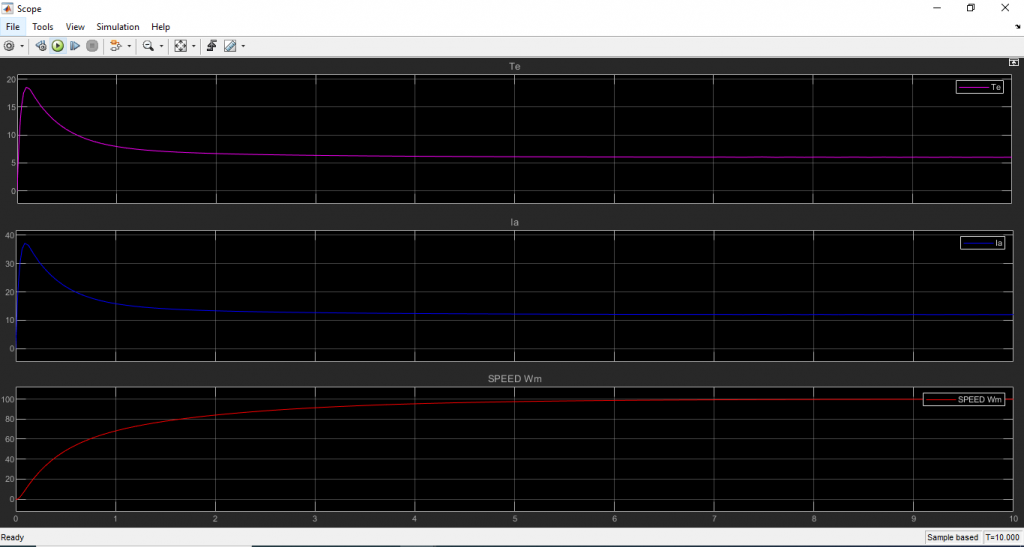
จากการจำลองการทำงานจะพบว่า ความเร็วของมอเตอร์ไฟฟ้ากระแสตรงจะลู่เข้าสู่ค่าอ้างอิง(reference) 100 rpm แรงบิดจะมีขนาด 6 N.m และมีกระแสไฟฟ้า 12 A เกิดขึ้นที่ Armature
สำหรับผู้สนใจสามารถดาวน์โหลด simulink file เพื่อนำไปศึกษาได้ที่นี้