พัลส์วิดมอดูเลชั่น(Pulse width modulation) เป็นเทคนิคการมอตดูเลตความกว้างของสัญญาณพัลส์ที่มีประสิทธิภาพและนำมาใช้งานอยู่บ่อยในในอุปกรณ์อิเล็กทรอนิกส์กำลัง เพื่อการควบคุมความเร็วรอบของมอเตอร์ เทคนิคการมอดูเลตความกว้างพัลส์จะช่วยลดกำลังไฟฟ้าที่ต้องใช้ในภาคอิเล็กทรอนิกส์กำลังลงไปได้
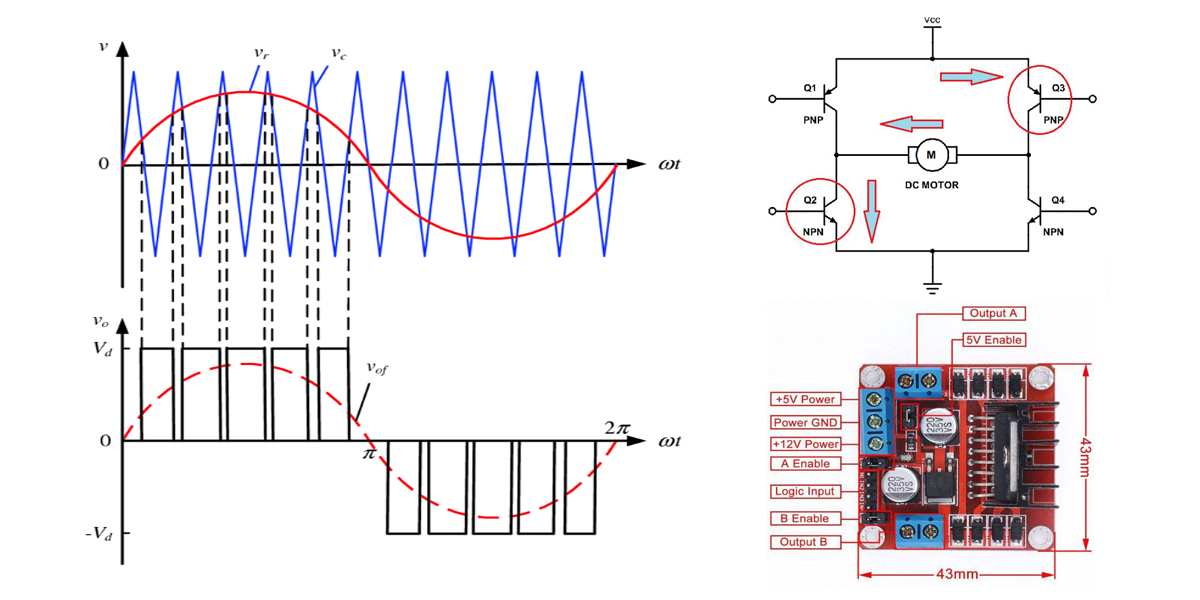
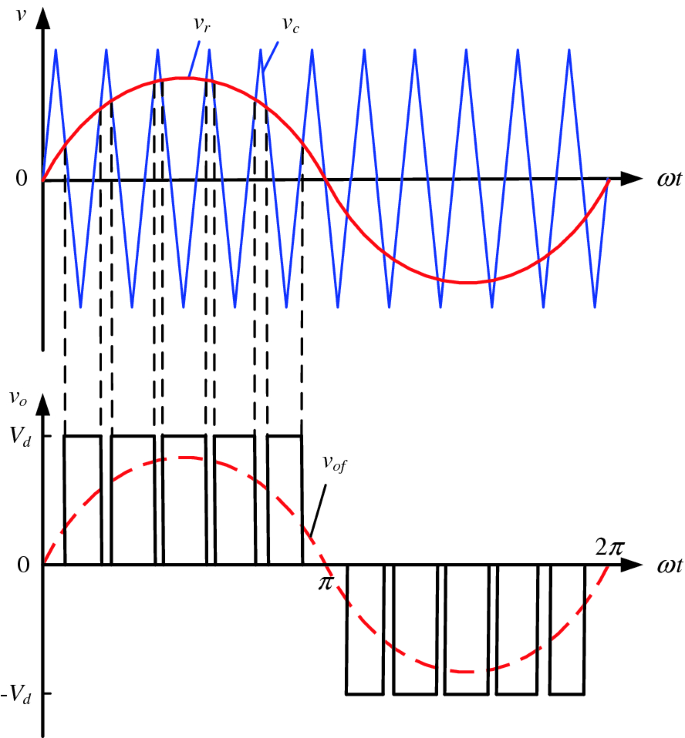
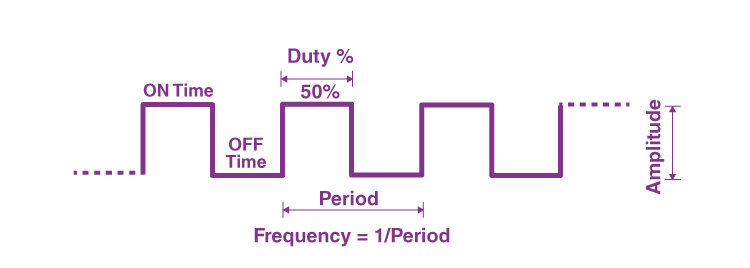
สัญญาณมอดูเลชั่นความกว้างพัลส์ถูกสร้างขึ้นโดยใช้ตัวเปรียบเทียบ ระหว่างสัญญาณฟันเลื่อยรูปสามเหลี่ยม และสัญญาณอ้างอิง ผลการเปรียบเทียบจะเป็นสัญญาณเป็นรูปคลื่นสี่เหลี่ยมที่มีขนาดความกว้างปรับเปลี่ยนได้ เช่นหากสัญญาณฟันเลื่อยมีค่าน้อยกว่าสัญญาณอ้างอิง สัญญาณเอาท์พุตจะอยู่ในสถานะ “สูง” ดังแสดงในรูปที่ 1
Duty Cycle of PWM ดังที่กล่าวข้างต้น สัญญาณ PWM จะ “On” ในช่วงเวลาหนึ่ง และจะคง “Off” ในอีกช่วงระยะเวลาที่เหลือง ช่วงเวลาการ “On” เมื่อเทียบกับสัญญาณรูปสามเหลี่ยมฟันเลื่อย 1 คาบ จะเรียกว่า Duty Cycle มีสูตรคำนวณดังนี้
(1)
Duty Cycle สามารถแสดงได้ดังรูปที่ 2
ความถี่ของ PWM สามารถคำนวณได้โดย
(2)
(3)
แรงดันไฟเอาท์พุตของสัญญาณ PWM แรงดันไฟเอาท์พุตที่ได้จากการทำ PWM จะคำนวณจาก เปอร์เซนต์ Duty Cycle ของหนึ่งคาบของสัญญาณ ตัวอย่างเช่น สมมติหนึ่งคาบการทำงานมี Duty Cycle = 100% หากแรงดันไฟฟ้าจากแหล่งจ่ายมีขนาด 5 V แรงดันไฟเอาท์พุตก็จะเป็น 5 V เช่นกัน หากหนึ่งคาบการทำงานมี Duty Cycle = 50% จะได้แรงดันเอาต์พุตเฉลี่ยเป็น 2.5 V
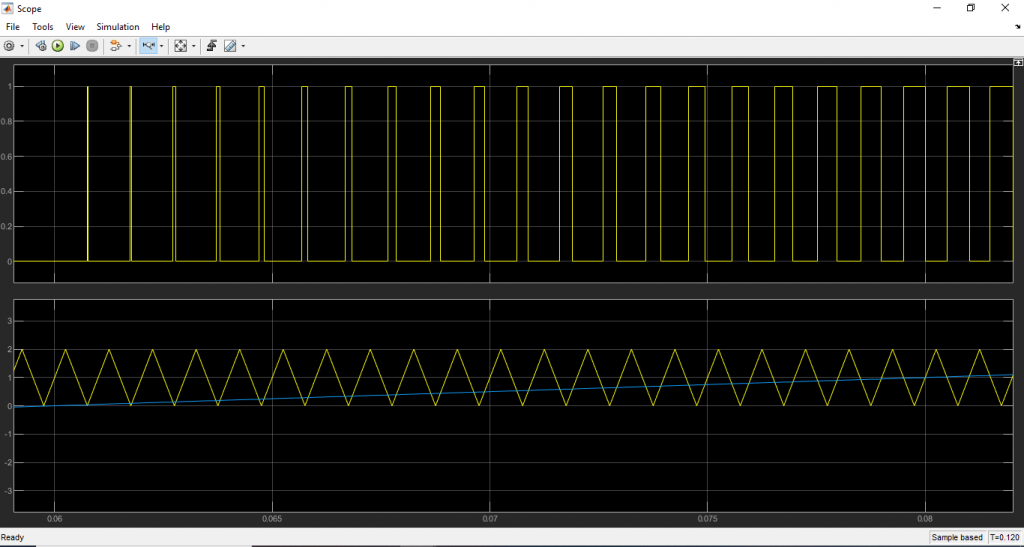
จำลองการทำงานของ Pulse Width Modulation โดยโปรแกรม Matlab/Simulink โดยการวางคอนโทรลบล๊อกไดอะแกรมดังภาพตัวอย่าง ผู้เขียนออกแบบให้แรงดันไฟฟ้าอ้างอิง 0 – 2V เป็นแรงดันอ้างอิง และสัญญาณสามเหลี่ยมฟันเลื่อยขนาด 2V และมีความถี่ 1 kHz
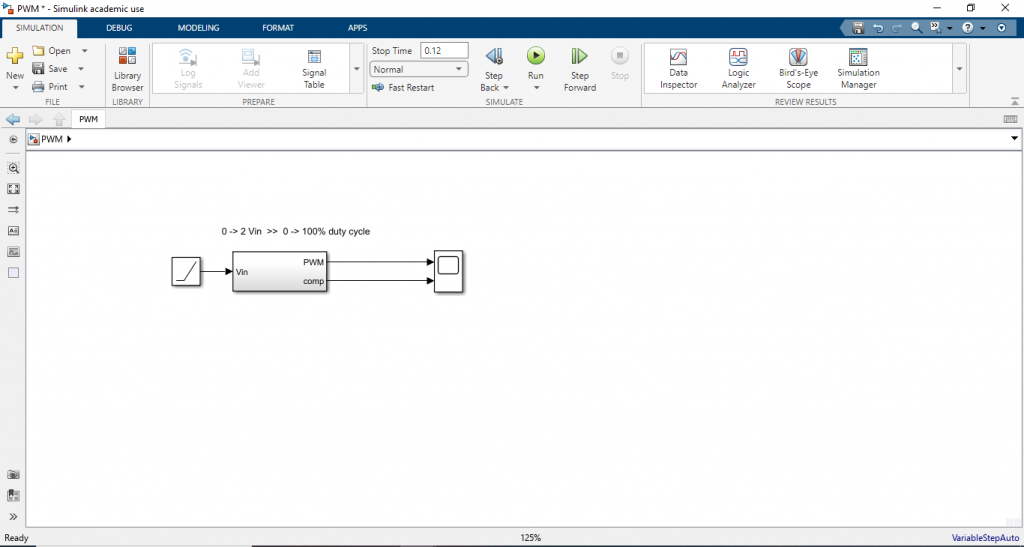

ดาวน์โหลด Matlab/Simulink ไฟล์ได้ทีนี่