24V DC Motor มีการนำมาใช้งานอย่างแพร่หลาย เนื่องมาจากแหล่งจ่ายไฟฟ้า 24VDC เป็นแหล่งจ่ายที่หาได้ง่าย พบได้ทั่วไป เช่น มอเตอร์ไฟฟ้าในรถยนต์ เครื่องใช้ไฟฟ้า อุปกรณ์เครืองมือช่าง ดังนั้นการศึกษาแบบจำลองดีซีมอเตอร์ เป็นประโยชน์ต่อการศึกษาพลศาสตร์ของระบบทางวิศวกรรมเป็นจำนวนมาก
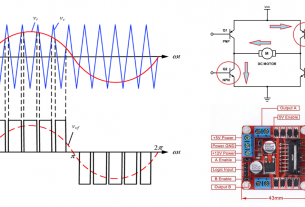
Circuit Diagram ของดีซีมอเตอร์แสดงได้ดังรูปที่ 1

จากบล๊อก จำลองการทำงาน DC Motor ด้วย Matlab/Simulink เราจะพบว่าสามารถเขียนสมการพลศาสตร์ของระบบได้ดังนี้
จากกฎ Kirchhoff Voltage Law จะได้
(1)
จัดรูปสมการ (1)
(2)
Back E.M.F. แสดงได้ดังสมการ
(3)
แทน (3) ใน (2) จะได้
(4)
จากกฎข้อที่ 2 ของนิวตัน สามารถเขียนสมการไดนามิค ดังนี้
(5)
โดยที่ \(T_{e}=T_{m}-T_{L}\) และ \(Cr=B_{m}\omega _{m}\)
แรงบิตทางไฟฟ้าของมอเตอร์ แสดงได้ดังนี้
(6)
แทนสมการ (6) ใน (5) และจัดรูป จะได้
(7)
\(C_{r}\) คือความต้านทานรวมในมอเตอร์
\(k\phi\) คือค่าคงที่มอเตอร์ อาจจะเขียนรวมเป็น \(K_{a}\)
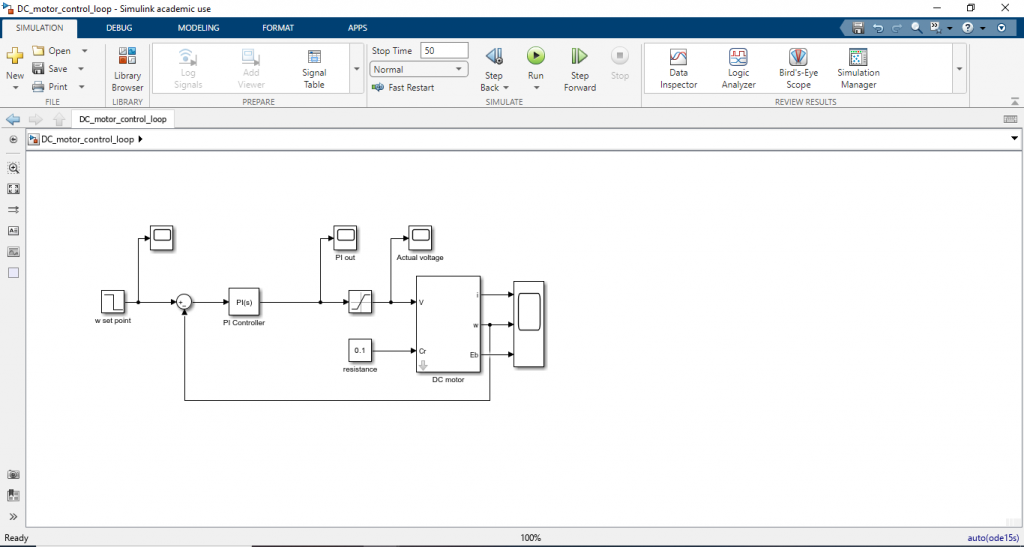
นำสมการ (3) (4) และ (7) รวมกับ พีไอ คอนโทรลเลอร์ (PI Controller) สร้างเป็นบล๊อคคอนโทรลไดอะแกรมบนโปรแกรม Matlab/Simulink ดังนี้
กำหนดให้
L=0.0028H
R=5.5 Ohm
k=1
\(\phi\)=0.5 Wb
J=0.5 kg m^2
Vdc=24 Volts

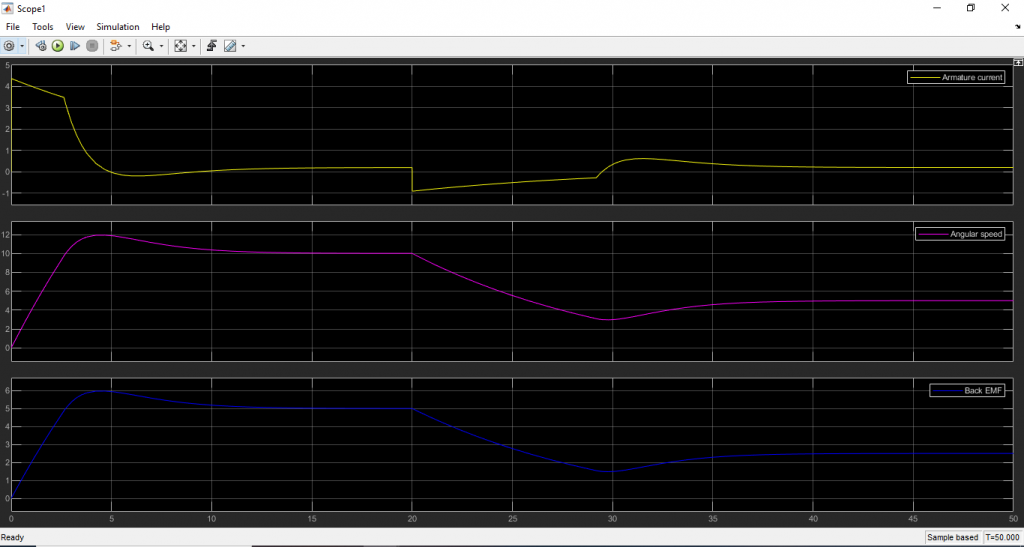
จำลองการทำงานโดป้อน Step Input ที่ 10 rad/s และลดค่าลงมาเหลือ 5 rad/s เมื่อ t=20 Sec. จะได้ผลลัพธ์ดังนี้
ดาวน์โหลดไฟล์ได้ที่นี่