เพื่อให้ผลตอบสนองของระบบเป็นไปตามต้องการ การใช้ตัวควบคุมเช่น ตัวควบคุมแบบพีไอดี (PID Controller) เป็นทางเลือกที่ได้รับความนิยม คาดว่าตัวควบคุมในอุตสาหกรรม 90% จะเป็นตัวควบคุมแบบพีไอดี โดยปกติแล้วการปรับตั้งค่าพารามิเตอร์ของ PID นั้นจำเป็นจะต้องทราบ Close loop dynamical system ของระบบ ซึ่งไม่ค่อยสะดวกสำหรับผู้ปฏิบัติงาน
บ่อยครั้งเป็นเรื่องที่ยากที่จะหาแบบจำลองทางพลศาสตร์ของระบบ การปรับแต่งตัวควบคุมกรณีนี้สามารถทำได้โดยใช้วิธีแนะนำของ Ziegler-Nichols Method
Ziegler-Nichols Method มีให้เลือกใช้ 2 วิธี คือ The first method และ The second method ในงานชิ้นนี้จะนำเสนอการปรับแต่งตัวคุมคุม โดยใช้ The first method ทั้งนี้ก็เพราะวิธีการนี้ไม่จำเป็นต้องเพิ่มขนาดอินพุตไปเรื่อยๆ จนระบบเกิดการ Oscillation ซึ่งในบางกระบวนการ การเพิ่มขนาดอินพุตจนระบบเกิด Oscillation มีความอันตราย หรือต้องใช้อินพุตขนาดใหญ่ แต่วิธีการ The first method เราจะใช้ผลตอบสนองของระบบแบบเปิดมาทำการคำนวณค่าพารามิเตอร์ของพีไอดีแบบวงปิด
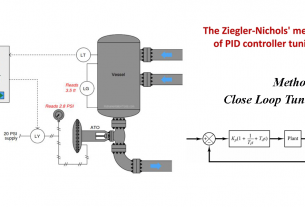
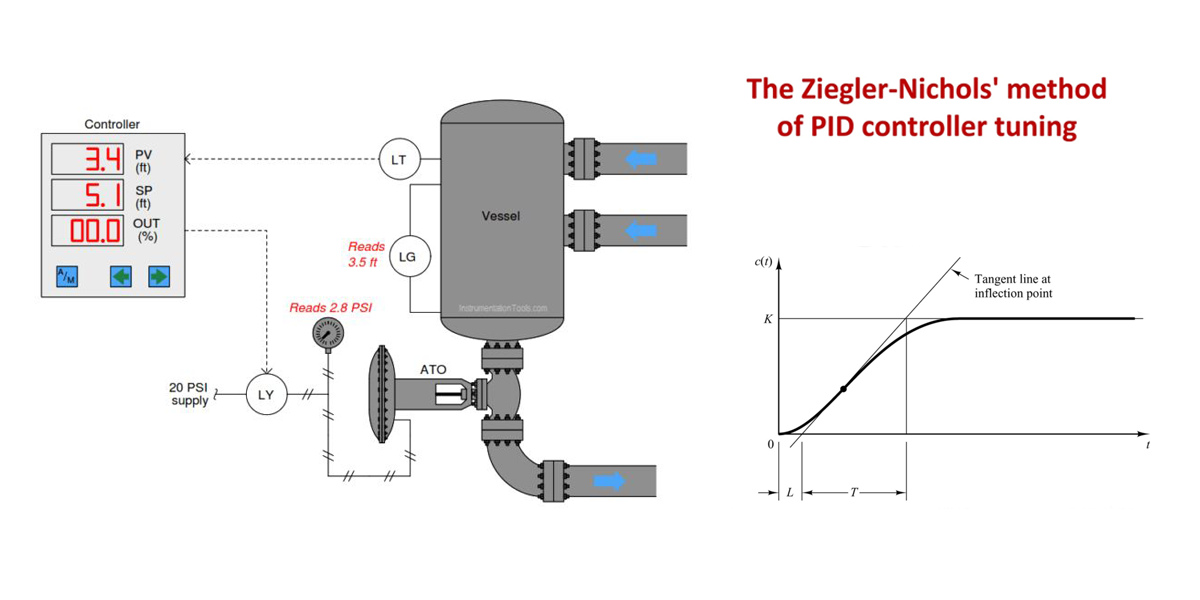
ระบบควบคุมกระบวนการแบบวงปิด(Close loop system) โดยใช้ตัวควบุคมแบบพีไอดี สามารถแสดงได้ดังรูป
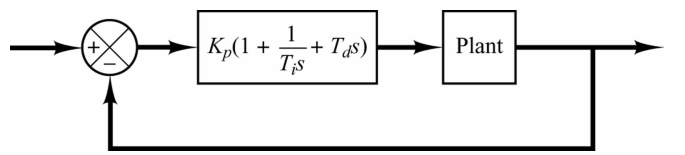
จากบล๊อกไดอะแกรมด้านบน(หรือระบบจริงหน้างาน) เราไม่ทราบว่ากระบวนการที่เราจะควบคุม (Plant) มีสมการพลศาสตร์เป็นอย่างไร จึงไม่สามารถใช้เครื่องมือเช่น Root Locus, Bode หรือ Nyquist เพื่อช่วยออกแบบตัวควบคุมได้
เราจะเริ่มวิธีการ Ziegler-Nicoles the first method ด้วยการปิดสัญญาณป้อนกลับและนำตัวควบคุมออกไปก่อน ให้ระบบกลายเป็นระบบควบคุมแบบเปิด ดังแสดงในภาพด้านล่าง
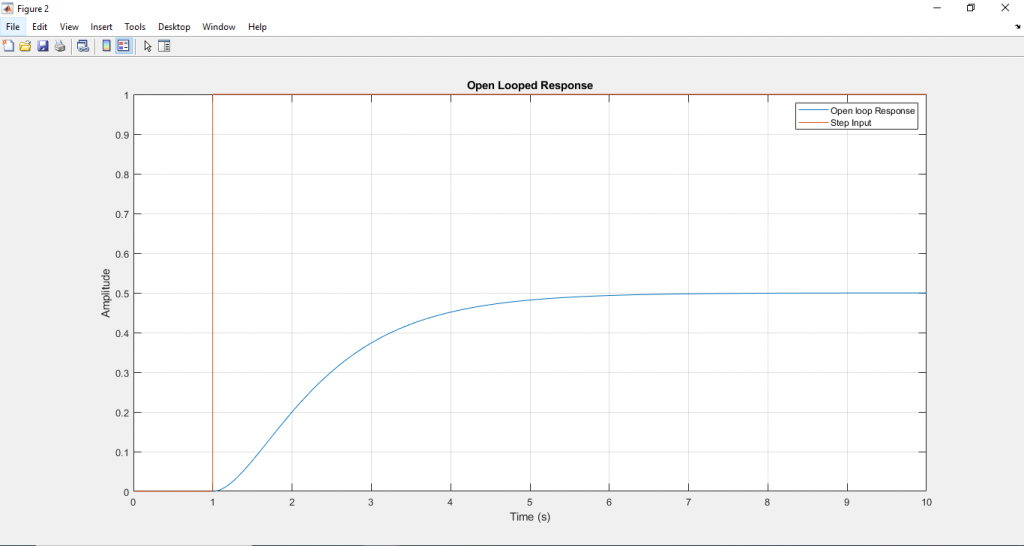
หลังจากได้ระบบแบบเปิดแล้วให้ทำการป้อนอินพุตที่เหมาะสมค่าหนึ่งที่ทำระบบแบบเปิดให้ผลตอบสนองประมาณ 60-90% ของผลอินพุต แล้วบันทึกค่าผลตอบสนองดังแสดงในภาพด้านล่าง เราจะเรียกว่า Reaction curve
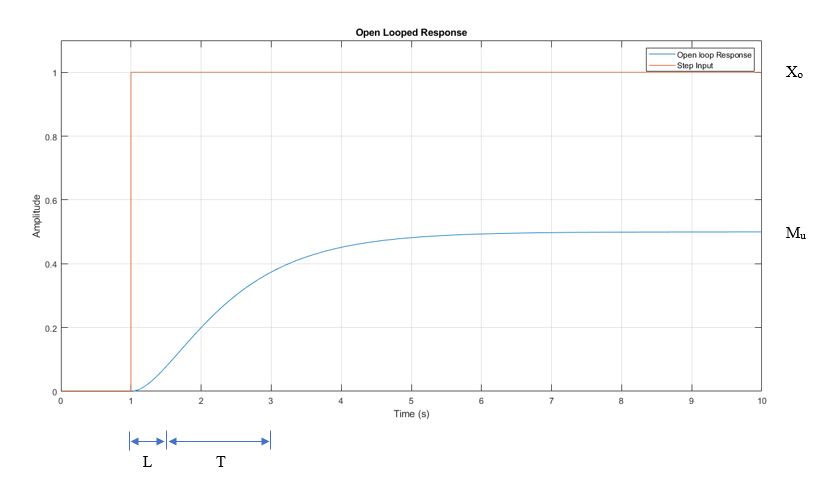
จากภาพจะเป็นการป้อนอินพุตเป็น Unit step ขนาด 1 (100% norminal rated) แล้วทำการบันทึกค่าผลตอบสนอง ปรากฎว่าระบบให้ผลตอบสนองออกมา 0.5( 50% norminal rated )จากการอ่านบันทึกการทดลอง จะพบว่า
Xo คือค่าอินพุตที่ป้อนให้กับระบบ = 1
Mu คือค่าผลตอบสนองของระบบแบบเปิด = 0.5
L คือช่วงเวลา dead zone ก่อนที่ผลตอบสนองของระบบจะเพิ่มขึ้นถึง 10% = 0.5 Sec.
T คือช่วงเวลาจาก 10% – 100% ของผลตอบสนอง = 1.5 Sec.
พิจารณาสมการ PID Controller จะได้
(1)
Ziegler-Nichols ‘s the first method ได้แนะนำการคำพารามิเตอร์ของพีไอดีไว้ดังนี้
(2)
หรือในบางตำราจะแนะนำให้เริ่มต้นคำนวณ Ko ดังนี้
(3)
พบว่าส่วนใหญ่แล้วนิยมใช้สมการ (3) เป็นตัวตั้งต้นในการคำนวณค่าพารามิเตอร์ของ PID Controller เมื่อได้ Ko แล้ว วิธีการ The first method ได้ให้คำแนะนำในการคำนวณค่าอื่นๆ ไว้ดังนี้
(4)
(5)
(6)
(7)
(8)
ค่าที่ได้จากสมการ (4) , (7) และ (8) จะถูกนำไปใช้เป็นพารามิเตอร์ของ PID Controller เพื่อควบคุมกระบวนการแบบวงปิด(Close loop)
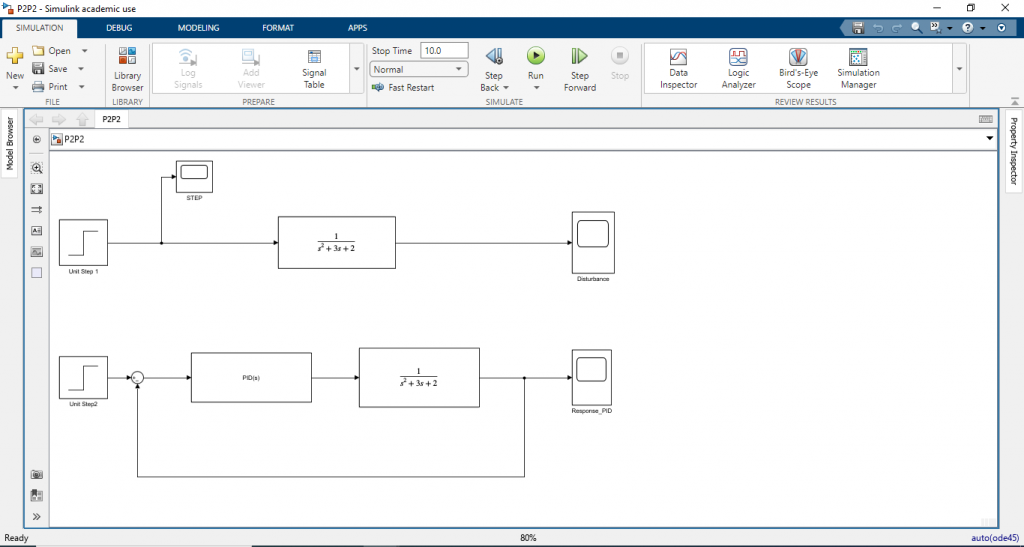
เราจะทำการทดสอบ Ziegler-Nicoles ‘s the first method โดยใช้โปรแกรม Simulink โดยสมมติว่าเรามีระบบควบคุมแบบปิดที่ไม่ทราบ Transfer function ของระบบ จึงทำการปลดระบบจากระบบควบคุมปิดให้เป็นระบบเปิด ทำการป้อนอินพุตให้กับระบบ และบันทึกค่าเพื่อให้ได้ Reaction Curve แล้วทำการคำนวณพีไอดีพารามิเตอร์ตามสมการ (3) – (8) เราจะได้ Kp , Ki และ Kd ที่จะถูกนำไปใช้สำหรับระบบควบคุมแบบวงปิดต่อไป
ทำการเปิดไฟล์ Simulink จะพบว่าเราได้ทำการปลดระบบป้อนกลับออก จนระบบกลายเป็นควบคุมแบบเปิด
และทำการเปิดไฟล์ Main_script.m และทำการ RUN
clear; clc; close all; % Clears the workspace and command window.
t0 = 0;
ti = 0.01;
tf = 10;
dt = 1E-2;
L = 0.5; % Time dead Zone
T = 1.5; % Time from 10% - 80%
%Kp = 1.2*(1/0.5)*(T/L); % Recommendation from Text book
Kp = 1.2*(T/L); % From my experience
Ti = 2*L;
Td = 0.5*L;
Ki = Kp/Ti;
Kd = Kp*Td;
%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Call Simulink Block Diagram%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
open_system('P2P2.slx')
ansRAMP = sim('P2P2.slx');
%%
%%%%%%%%%%%%%%%%%%%%%
%Plot Control System%
%%%%%%%%%%%%%%%%%%%%%
hold all % This is so each plot is actually gets plotted instead of overriding each other.
figure (1);
plot(ansRAMP.Disturbance(:,1),ansRAMP.Disturbance(:,2));
hold on;
plot(ansRAMP.Response_PID(:,1),ansRAMP.Response_PID(:,2));
hold on;
plot(ansRAMP.STEP(:,1),ansRAMP.STEP(:,2));
title('PID Controller Design');
xlabel('Time (s)');
ylabel('Amplitude');
legend('Open loop Response', 'PID Response', 'Step Function');
grid on;
hold on;
figure (2);
plot(ansRAMP.Disturbance(:,1),ansRAMP.Disturbance(:,2));
hold on;
plot(ansRAMP.STEP(:,1),ansRAMP.STEP(:,2));
title('Open Looped Response');
xlabel('Time (s)');
ylabel('Amplitude');
legend('Open loop Response', 'Step Input');
grid on;
เราจะได้ผลตอบสนองของระบบแบบเปิด ให้ทำการหาค่า L และ T เพื่อนำไปใช้ในการคำนวณหาค่าพารามิเตอร์ของตัวควบคุมแบบพีไอดีต่อไป
หลังจากนั้นให้นำค่าพารามิเตอร์ของพีไอดีคอนโทรลเลอร์ที่คำนวณได้ กำหนดลงไปในตัวควบคุมแบบพีไอดี ภายในสคริป Main_script.m เพื่อทำการจำลองการทำงานของระบบแบบวงปิด เราจะได้ผลตอบสนองแบบปิดดังนี้
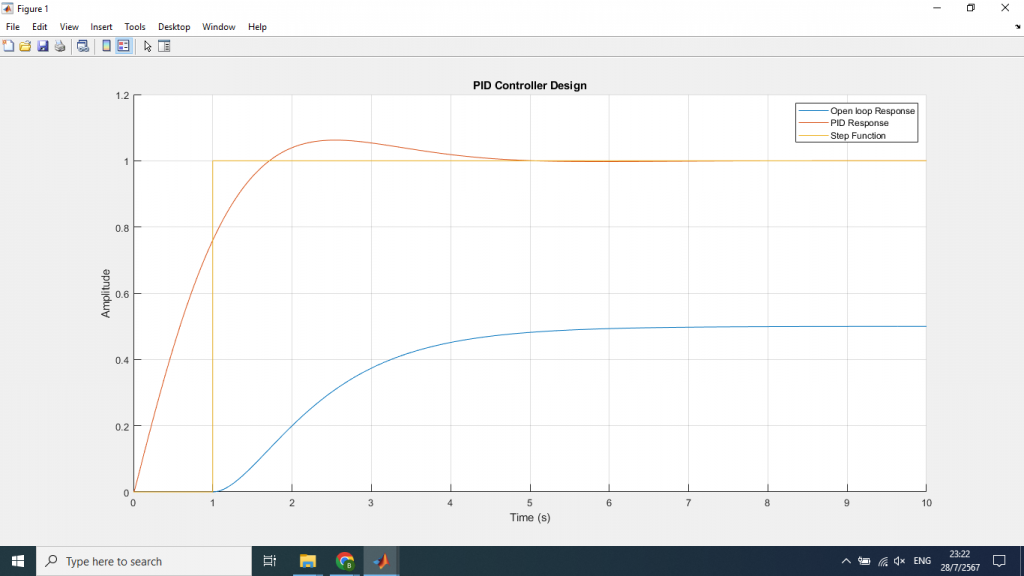
จากตัวอย่างเราจะได้ค่าพารามิเตอร์ของ PID Controller โดยไม่จำเป็นต้องทราบแบบจำลองทางพลศาสตร์ของกระบวนการเลย จากการ Simulation พบว่า PID Controller สามารถควบคุมกระบวนการให้ผลตอบสนอนลู่เข้าหา Set point ตามต้องการภายในเวลา 5 วินาที
ดาวน์โหลด Simulink file ได้ที่นี่