เซอร์โวไฮดรอลิก เป็นอุปกรณ์ที่มีใช้อย่างแพร่หลายในอุตสาหกรรมหนัก เพราะด้วยคุณสมบัติของระบบไฮดรอลิกที่ให้กำลังสูง สามารถยกสิ่งของน้ำหนักตั้งแต่ไม่กี่กิโลกรัม ถึงหลายสิบตัน
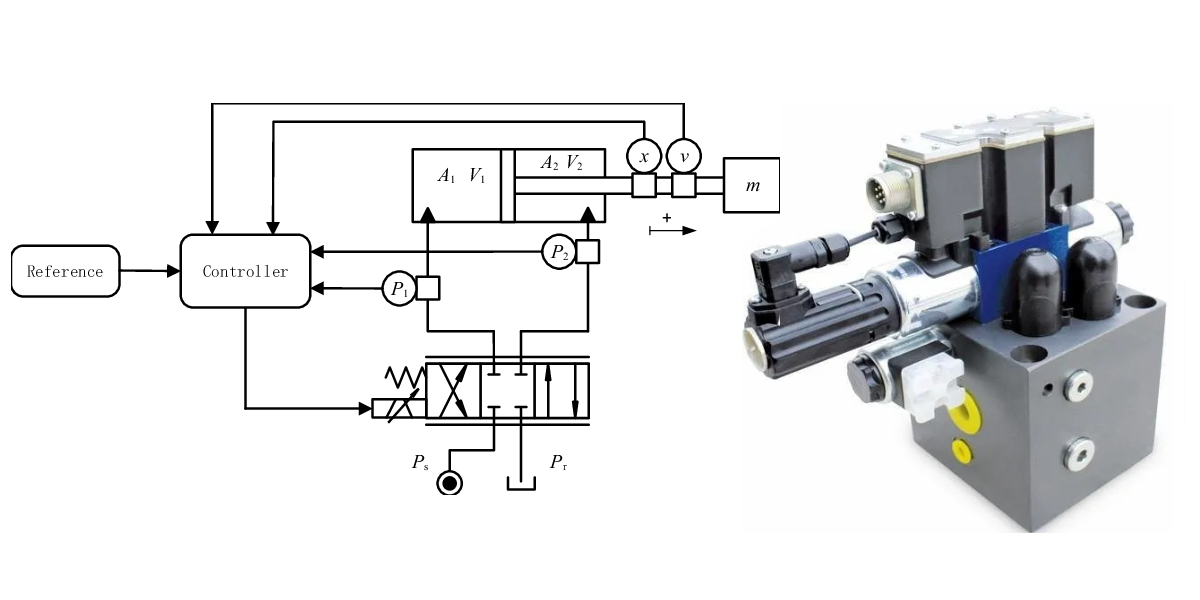
เซอร์โวไฮดรอลิก ค่อนข้างมีราคาแพงโดยมาแล้วผู้ผลิตจะสร้างสำเร็จรูป เราสามารถนำไปใช้งานได้ทันที แต่ในบล๊อกนี้จะเข้าไปเจาะเบื้องหลังในการสร้างระบบควบคุมของเซอร์โวไฮดรอลิก โดยสามารถเขียนไดอะแกรมได้ดังนี้
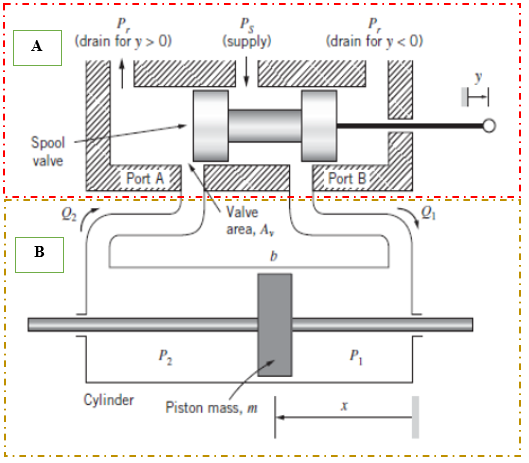
จากรูปที่ 1 จะเห็นว่าสามารถแบ่งอุปกรณ์ได้เป็น 2 ส่วน
ส่วน A จะเป็นวาล์วไฮดรอลิก โซลินอยไฟฟ้า รวมถึงอุปกรณ์อื่นๆ ที่ทำหน้าที่ควบคุม ปริมาตรของน้ำมันไหลเข้า-ไหลออก กระบอกสูบ โดยในส่วนนี้เราจะใช้วิธีการ System Identification การประมาณ Transfer function ของระบบที่เราไม่ทราบสมการพลศาสตร์ (System Indentification) ด้วยสมการอนุพันธ์อันดับสอง
ส่วน B จะเป็นชุดกระบอกสูบ ที่ต้องมีกำลังสูงเพื่อทำหน้าที่ ยก กด ดัด และอื่นๆ ที่ต้องใช้กำลังสูง ในส่วนนี้เราจะใช้วิธีหาสมการพลศาสตร์โดยใช้ความรู้ทาง Fluid Mechanics
เราจะเริ่มที่การทำ System Identifation ส่วน A ก่อน
จากการทดสอบเซอร์โววาล์ว พบว่าเมื่อป้อนแรงดันไฟฟ้าควบคุม จาก 0- 10 V จะทำให้ Spool Valve เคลื่อนที่ตามสมการดังนี้
(1)
ทำการทดสอบป้อนสัญญาณ Step Unit ขนาด 10V ที่ t = 0.5 Sec. และ หยุดป้อนสัญญาณ ที่ t=1.0 Sec. แล้วบันทึกการเคลื่อนที่ของ Spool Valve ด้วยเครื่องมือวัด แสดงได้ดังรูปที่ 2
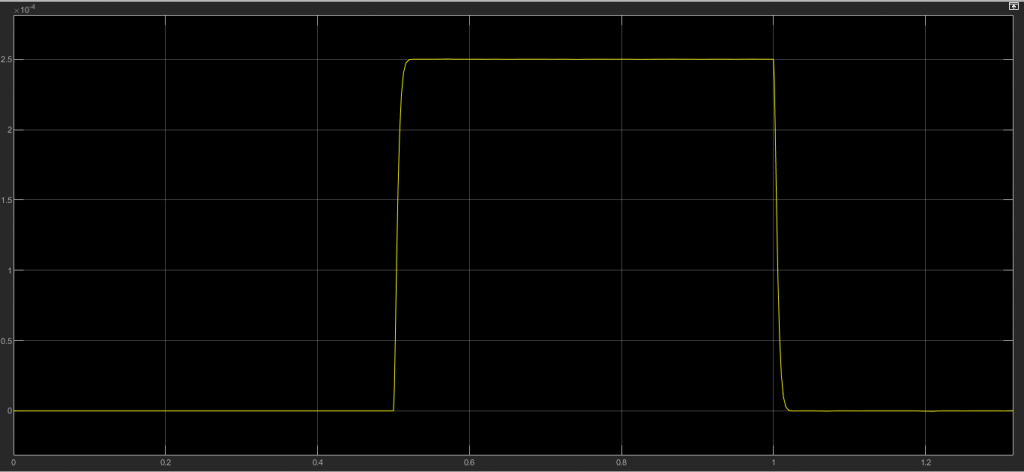
จากรูปที่ 2 เราพบข้อมูลสำคัญดังนี้
พบว่าวาล์วมีการเคลือนที่จากจุดศูนย์ไปยังตำแหน่ง y=0.25mm
จากผลการทดลองพบว่าค่า Settling Time = 12.7 ms (0.0127 Sec.)
จากผลการทดลองพบว่าระบบแทบไม่เกิด Over shoot ดังนั้น ค่า Dampling Ratio น่าจะค่อนข้างสูง โดยมีค่าระหว่าง 0.8 ถึง 1.0+
Transfer function ของระบบที่มีอนุพันธ์อันดับสอง สามารถแสดงได้ดังบล๊อกไดอะแกรม
G(s) เป็นแบบจำลองที่เราจะทำการ System Identificaion โดยสามารถเขียนได้ดังนี้
(2)
จากความสัมพันธ์ที่ได้จากสมการ (1) จะทำให้เราทราบว่า
(3)
จากบทความก่อนหน้าเราทราบว่าในระบบพลศาสตร์ที่มีอนุพันธ์อันดับสองจะมีค่า Settling Time ดังนี้
(4)
จัดรูปสมการ (4) ทำให้เราทราบว่า
(5)
ยังคงเหลือค่า Dampling ration \(\delta\) ที่เรายังไม่ทราบค่าแน่ชัด
จากบทความก่อนหน้าเรื่อง การประมาณ Transfer function ของระบบที่เราไม่ทราบสมการพลศาสตร์ (System Indentification) ด้วยสมการอนุพันธ์อันดับสอง
ผู้เขียนได้ทดสอบรันสคริป และเปลี่ยนค่า =0.93 และจากสมการ (5) ทำให้ได้ค่า =338 พบว่าให้ผลตอบสนองใกล้เคียงกับผลการทดลองในรูปที่ 2 มากที่สุด
จากสมการ (2) จะเขียน Transfer function ได้เป็น
(6)
หาแบบจำลองทางพลศาสตร์ของ ส่วน B
ให้ปริมาตรน้ำมันไหลผ่าน Spool valve เข้ากระบอกสูบแสดงได้ด้วยสมการ
(7)
และในขณะเดียวกันน้ำมันจะไหลออกจากกระบอกสูบ ผ่าน Spool valve กลับลงถัง แสดงได้ด้วยสมการ
(8)
สมมติให้การไหลของน้ำมันเป็นแบบต่อเนื่อง(steady state) และ น้ำมันไม่สามารถบีบอัดตัวได้ (incompressible) จะได้ว่า \(Q_{1}=Q_{2}\) จะได้สมการ
(9)
ให้ \(\Delta P=P_{1}-P_{2}\) และ \(\Delta P> 0\) เพราะน้ำมันไหลจาก chamber 2 กลับลงอ่าง สามารถจัด สมการ (9) ใหม่ได้เป็น
(10)
ปกติแล้ว ความดัน \(P_{r}\) จะน้อยกว่าความดันตัวอื่นๆ มาก จึงสามารถตัดเทอมนี้ทิ้งได้ จัดรูปสมการ (10) ได้เป็น
(11)
แทนสมการ (11) กลับลงใน สมการ (7) จะได้
(12)
จากความสัมพันธ์พื้นที่หน้าตัด \(A_{v}=hy \) สมการ (12) เขียนใหม่ได้เป็น
(13)
ทำการ Linearized สมการ (13) รอบๆ จุดทำงาน \(y^{\ast }\) และ \(\Delta P^{\ast }\)
(14)
จะได้อนุพันธ์ย่อยของสมการ (14) ดังนี้
(15)
และ
(16)
ณ จุดที่ทำการ linearized ให้เป็นสภาวะที่ยังไม่เกิดการเปลี่ยนแปลง nominal state \(y^{\ast }\)=0 และ \(\Delta P^{\ast }\)=0 (no flow) จะได้
(17)
และ
(18)
สมการ (14) ที่ทำการแปลงให้เป็นเชิงเส้นแล้วจะสามารถเขียนใหม่ได้เป็น
(19)
จากสภาวะรอบๆ จุด ที่ทำการแปลงเป็นเชิงเส้น \(\delta Q_{1}=Q_{1}-Q_{1}^{\ast }\) และ \(\delta y=y-y^{\ast }\) รวมถึงสมมติฐานที่ให้สภาวะ ณ จุดนี้ยังไม่เกิดการเปลี่ยนแปลง \(Q_{1}^{\ast }\)=0 , \(y^{\ast }\)=0 เขียนสมการ (19) ใหม่ได้เป็น
(20)
อนุพันธ์ของปริมาตร \(\dot{V_{1}}=A\dot{x}\) สมการ (20) จะกลายเป็น
(21)
จัดรูปสมากร (21) เราจะได้สมการพลศาสตร์ของส่วน B
(22)
โดยที่ \(K_{HA}=\frac{C_{d}h}{A}\sqrt{\frac{P_{s}}{\varrho }}\)
ทำการอินทริเกรท สมการ (22) จะได้
(23)
โดยที่ \(x_{0}\) คือตำแหน่งเริ่มต้นของกระบอกสูบ
ทำการจำลงอการทำงานใน Matlab/Simulink โดยการสร้างคอนโทรลบล๊อกไดอะแกรมดังภาพ
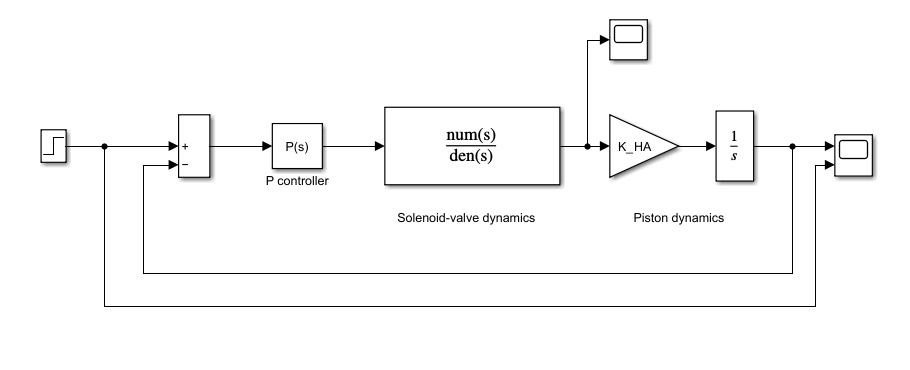
และทำการรับ Script ดังนี้
%% PARAMETERS
m = 12; % kg Piston and load mass
b = 215; % Viscous friction coefficient, b, N.s/m
A = 6.78*(10^(-4)); % Piston area, A,m2
V0 = 1.58*(10^(-4)); % Minimum chamber volume, V0,m3
L = 0.68; % Piston stroke, L, m
P_s = 18*10^6; % Supply pressure, PS, MPa
P_r = 0.12133*(10^(6)); %Reservoir (drain) pressure, Pr, MPa
beta = 729*(10^(6)); % Fluid bulk modulus, ? ,MPa
Cd = 0.72; % Valve discharge coefficient, Cd
rho = 899; % Fluid density, ? , kg/m3
h = 0.0094; % Valve orifice height, h, m
wn = 338; % Solenoid–valve undamped natural frequency, ?n , rad/s
zeta = 0.93; % Solenoid–valve damping ratio, ?
Kv = 25*(10^(-6)); % Solenoid–valve DC gain, Kv mm/V
K_HA = ((Cd*h)/A)*sqrt(P_s/rho); % hydraulic actuator gain
KP=1550;
K_LF=2000;
%%
sysG=tf(4034,[1 628 114244 0 ]);
rlocus(sysG)
title('Root Locus')
%%
Kp=1550
Close_Loop_poles=rlocus(sysG,Kp)
%%
open("Proportional.slx")
sim("Proportional.slx")
จะได้ผลลัพธ์ดังนี้
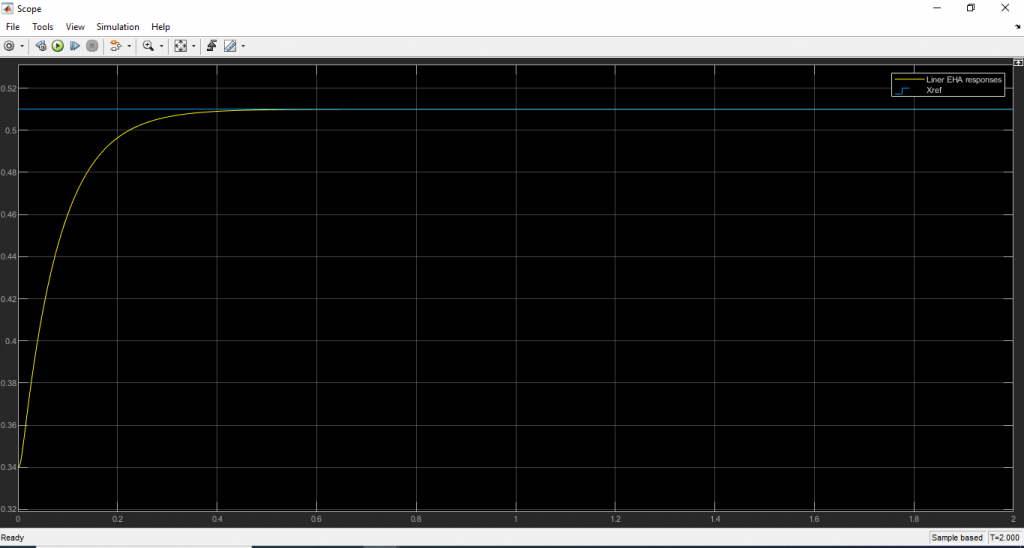
โหลดไฟล์ Matlab/Simulink ได้ที่นี่